
In computer science, an AVL tree is a self-balancing binary search tree. It was the first such data structure to be invented. In an AVL tree, the heights of the two child subtrees of any node differ by at most one; if at any time they differ by more than one, rebalancing is done to restore this property. Lookup, insertion, and deletion all take O(log n) time in both the average and worst cases, where is the number of nodes in the tree prior to the operation. Insertions and deletions may require the tree to be rebalanced by one or more tree rotations.

In computer science, binary search, also known as half-interval search, logarithmic search, or binary chop, is a search algorithm that finds the position of a target value within a sorted array. Binary search compares the target value to the middle element of the array. If they are not equal, the half in which the target cannot lie is eliminated and the search continues on the remaining half, again taking the middle element to compare to the target value, and repeating this until the target value is found. If the search ends with the remaining half being empty, the target is not in the array. Even though the idea is simple, implementing binary search correctly requires attention to some subtleties about its exit conditions and midpoint calculation, particularly if the values in the array are not all of the whole numbers in the range.

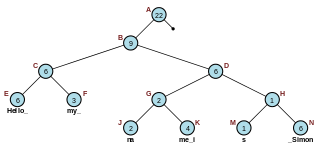
In computer science, a binary tree is a tree data structure in which each node has at most two children, which are referred to as the left child and the right child. A recursive definition using just set theory notions is that a (non-empty) binary tree is a tuple, where L and R are binary trees or the empty set and S is a singleton set. Some authors allow the binary tree to be the empty set as well.
In computer science, a B-tree is a self-balancing tree data structure that maintains sorted data and allows searches, sequential access, insertions, and deletions in logarithmic time. The B-tree is a generalization of a binary search tree in that a node can have more than two children. Unlike self-balancing binary search trees, the B-tree is well suited for storage systems that read and write relatively large blocks of data, such as discs. It is commonly used in databases and file systems.
A splay tree is a self-balancing binary search tree with the additional property that recently accessed elements are quick to access again. It performs basic operations such as insertion, look-up and removal in O(log n) amortized time. For many sequences of non-random operations, splay trees perform better than other search trees, even when the specific pattern of the sequence is unknown. The splay tree was invented by Daniel Sleator and Robert Tarjan in 1985.

A binary heap is a heap data structure that takes the form of a binary tree. Binary heaps are a common way of implementing priority queues. The binary heap was introduced by J. W. J. Williams in 1964, as a data structure for heapsort.

Depth-first search (DFS) is an algorithm for traversing or searching tree or graph data structures. The algorithm starts at the root node and explores as far as possible along each branch before backtracking.
In computer science, a Fibonacci heap is a data structure for priority queue operations, consisting of a collection of heap-ordered trees. It has a better amortized running time than many other priority queue data structures including the binary heap and binomial heap. Michael L. Fredman and Robert E. Tarjan developed Fibonacci heaps in 1984 and published them in a scientific journal in 1987. Fibonacci heaps are named after the Fibonacci numbers, which are used in their running time analysis.
In computer science, a skip list is a data structure that allows O(log n) search complexity as well as O(log n) insertion complexity within an ordered sequence of n elements. Thus it can get the best of array while maintaining a linked list-like structure that allows insertion- which is not possible in an array. Fast search is made possible by maintaining a linked hierarchy of subsequences, with each successive subsequence skipping over fewer elements than the previous one. Searching starts in the sparsest subsequence until two consecutive elements have been found, one smaller and one larger than or equal to the element searched for. Via the linked hierarchy, these two elements link to elements of the next sparsest subsequence, where searching is continued until finally we are searching in the full sequence. The elements that are skipped over may be chosen probabilistically or deterministically, with the former being more common.

In computer science, a suffix tree is a compressed trie containing all the suffixes of the given text as their keys and positions in the text as their values. Suffix trees allow particularly fast implementations of many important string operations.
The Wedderburn–Etherington numbers are an integer sequence named for Ivor Malcolm Haddon Etherington and Joseph Wedderburn that can be used to count certain kinds of binary trees. The first few numbers in the sequence are
In computer programming, a rope, or cord, is a data structure composed of smaller strings that is used to efficiently store and manipulate a very long string. For example, a text editing program may use a rope to represent the text being edited, so that operations such as insertion, deletion, and random access can be done efficiently.
In computer science, the longest common substring problem is to find the longest string that is a substring of two or more strings.
In computer science, the prefix sum, cumulative sum, inclusive scan, or simply scan of a sequence of numbers x0, x1, x2, ... is a second sequence of numbers y0, y1, y2, ..., the sums of prefixes of the input sequence:
In computer science, a finger tree is a purely functional data structure that can be used to efficiently implement other functional data structures. A finger tree gives amortized constant time access to the "fingers" (leaves) of the tree, which is where data is stored, and concatenation and splitting logarithmic time in the size of the smaller piece. It also stores in each internal node the result of applying some associative operation to its descendants. This "summary" data stored in the internal nodes can be used to provide the functionality of data structures other than trees.
In computer science and probability theory, a random binary tree is a binary tree selected at random from some probability distribution on binary trees. Two different distributions are commonly used: binary trees formed by inserting nodes one at a time according to a random permutation, and binary trees chosen from a uniform discrete distribution in which all distinct trees are equally likely. It is also possible to form other distributions, for instance by repeated splitting. Adding and removing nodes directly in a random binary tree will in general disrupt its random structure, but the treap and related randomized binary search tree data structures use the principle of binary trees formed from a random permutation in order to maintain a balanced binary search tree dynamically as nodes are inserted and deleted.
In computer science, one approach to the dynamic optimality problem on online algorithms for binary search trees involves reformulating the problem geometrically, in terms of augmenting a set of points in the plane with as few additional points as possible in order to avoid rectangles with only two points on their boundary.
In computer science, an optimal binary search tree , sometimes called a weight-balanced binary tree, is a binary search tree which provides the smallest possible search time for a given sequence of accesses. Optimal BSTs are generally divided into two types: static and dynamic.

A Behavior Tree (BT) is a mathematical model of plan execution used in computer science, robotics, control systems and video games. They describe switchings between a finite set of tasks in a modular fashion. Their strength comes from their ability to create very complex tasks composed of simple tasks, without worrying how the simple tasks are implemented. BTs present some similarities to hierarchical state machines with the key difference that the main building block of a behavior is a task rather than a state. Its ease of human understanding make BTs less error prone and very popular in the game developer community. BTs have been shown to generalize several other control architectures.
The Garsia–Wachs algorithm is an efficient method for computers to construct optimal binary search trees and alphabetic Huffman codes, in linearithmic time. It is named after Adriano Garsia and Michelle L. Wachs.





