An internal sort is any data sorting process that takes place entirely within the main memory of a computer. This is possible whenever the data to be sorted is small enough to all be held in the main memory. For sorting larger datasets, it may be necessary to hold only a chunk of data in memory at a time, since it won’t all fit. The rest of the data is normally held on some larger, but slower medium, like a hard-disk. Any reading or writing of data to and from this slower media can slow the sortation process considerably. This issue has implications for different sort algorithms.
Consider a Bubblesort, where adjacent records are swapped in order to get them into the right order, so that records appear to “bubble” up and down through the dataspace. If this has to be done in chunks, then when we have sorted all the records in chunk 1, we move on to chunk 2, but we find that some of the records in chunk 1 need to “bubble through” chunk 2, and vice versa (i.e., there are records in chunk 2 that belong in chunk 1, and records in chunk 1 that belong in chunk 2 or later chunks). This will cause the chunks to be read and written back to disk many times as records cross over the boundaries between them, resulting in a considerable degradation of performance. If the data can all be held in memory as one large chunk, then this performance hit is avoided.
On the other hand, some algorithms handle external sorting rather better. A Merge sort breaks the data up into chunks, sorts the chunks by some other algorithm (maybe bubblesort or Quick sort) and then recombines the chunks two by two so that each recombined chunk is in order. This approach minimises the number or reads and writes of data-chunks from disk, and is a popular external sort method.
External sorting is a class of sorting algorithms that can handle massive amounts of data. External sorting is required when the data being sorted do not fit into the main memory of a computing device and instead they must reside in the slower external memory, usually a hard disk drive. Thus, external sorting algorithms are external memory algorithms and thus applicable in the external memory model of computation.
In computer science, merge sort is an efficient, general-purpose, comparison-based sorting algorithm. Most implementations produce a stable sort, which means that the order of equal elements is the same in the input and output. Merge sort is a divide and conquer algorithm that was invented by John von Neumann in 1945. A detailed description and analysis of bottom-up mergesort appeared in a report by Goldstine and von Neumann as early as 1948.
Related Research Articles
In computer science, a B-tree is a self-balancing tree data structure that maintains sorted data and allows searches, sequential access, insertions, and deletions in logarithmic time. The B-tree is a generalization of a binary search tree in that a node can have more than two children. Unlike other self-balancing binary search trees, the B-tree is well suited for storage systems that read and write relatively large blocks of data, such as discs. It is commonly used in databases and file systems.
Computer data storage, often called storage or memory, is a technology consisting of computer components and recording media that are used to retain digital data. It is a core function and fundamental component of computers.
In computer architecture, a bus is a communication system that transfers data between components inside a computer, or between computers. This expression covers all related hardware components and software, including communication protocols.
In computing, a cache is a hardware or software component that stores data so that future requests for that data can be served faster; the data stored in a cache might be the result of an earlier computation or a copy of data stored elsewhere. A cache hit occurs when the requested data can be found in a cache, while a cache miss occurs when it cannot. Cache hits are served by reading data from the cache, which is faster than recomputing a result or reading from a slower data store; thus, the more requests that can be served from the cache, the faster the system performs.
In computer science, a linked list is a linear collection of data elements, whose order is not given by their physical placement in memory. Instead, each element points to the next. It is a data structure consisting of a collection of nodes which together represent a sequence. In its most basic form, each node contains: data, and a reference to the next node in the sequence. This structure allows for efficient insertion or removal of elements from any position in the sequence during iteration. More complex variants add additional links, allowing more efficient insertion or removal of nodes at arbitrary positions. A drawback of linked lists is that access time is linear. Faster access, such as random access, is not feasible. Arrays have better cache locality compared to linked lists.
In computer science, a sorting algorithm is an algorithm that puts elements of a list in a certain order. The most frequently used orders are numerical order and lexicographical order. Efficient sorting is important for optimizing the efficiency of other algorithms that require input data to be in sorted lists. Sorting is also often useful for canonicalizing data and for producing human-readable output. More formally, the output of any sorting algorithm must satisfy two conditions:
The output is in nondecreasing order ;
The output is a permutation of the input.
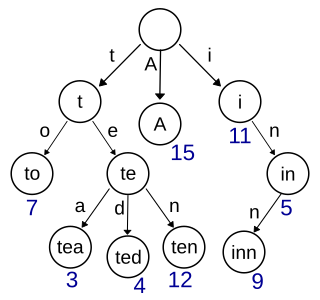
In computer science, a trie, also called digital tree or prefix tree, is a kind of search tree—an ordered tree data structure used to store a dynamic set or associative array where the keys are usually strings. Unlike a binary search tree, no node in the tree stores the key associated with that node; instead, its position in the tree defines the key with which it is associated. All the descendants of a node have a common prefix of the string associated with that node, and the root is associated with the empty string. Keys tend to be associated with leaves, though some inner nodes may correspond to keys of interest. Hence, keys are not necessarily associated with every node. For the space-optimized presentation of prefix tree, see compact prefix tree.
In computer science, algorithmic efficiency is a property of an algorithm which relates to the number of computational resources used by the algorithm. An algorithm must be analyzed to determine its resource usage, and the efficiency of an algorithm can be measured based on usage of different resources. Algorithmic efficiency can be thought of as analogous to engineering productivity for a repeating or continuous process.
A database engine is the underlying software component that a database management system (DBMS) uses to create, read, update and delete (CRUD) data from a database. Most database management systems include their own application programming interface (API) that allows the user to interact with their underlying engine without going through the user interface of the DBMS.
In computer operating systems, paging is a memory management scheme by which a computer stores and retrieves data from secondary storage for use in main memory. In this scheme, the operating system retrieves data from secondary storage in same-size blocks called pages. Paging is an important part of virtual memory implementations in modern operating systems, using secondary storage to let programs exceed the size of available physical memory.
In computer science, a lookup table is an array that replaces runtime computation with a simpler array indexing operation. The savings in terms of processing time can be significant, since retrieving a value from memory is often faster than undergoing an "expensive" computation or input/output operation. The tables may be precalculated and stored in static program storage, calculated as part of a program's initialization phase (memoization), or even stored in hardware in application-specific platforms. Lookup tables are also used extensively to validate input values by matching against a list of valid items in an array and, in some programming languages, may include pointer functions to process the matching input. FPGAs also make extensive use of reconfigurable, hardware-implemented, lookup tables to provide programmable hardware functionality.
MapReduce is a programming model and an associated implementation for processing and generating big data sets with a parallel, distributed algorithm on a cluster.
In computing, external memory algorithms or out-of-core algorithms are algorithms that are designed to process data that is too large to fit into a computer's main memory at one time. Such algorithms must be optimized to efficiently fetch and access data stored in slow bulk memory such as hard drives or tape drives, or when memory is on a computer network. External memory algorithms are analyzed in the external memory model.
In computer storage, fragmentation is a phenomenon in which storage space is used inefficiently, reducing capacity or performance and often both. The exact consequences of fragmentation depend on the specific system of storage allocation in use and the particular form of fragmentation. In many cases, fragmentation leads to storage space being "wasted", and in that case the term also refers to the wasted space itself. For other systems the space used to store given data is the same regardless of the degree of fragmentation.
In computer storage, the standard RAID levels comprise a basic set of RAID configurations that employ the techniques of striping, mirroring, or parity to create large reliable data stores from multiple general-purpose computer hard disk drives (HDDs). The most common types are RAID 0 (striping), RAID 1 (mirroring) and its variants, RAID 5, and RAID 6. RAID levels and their associated data formats are standardized by the Storage Networking Industry Association (SNIA) in the Common RAID Disk Drive Format (DDF) standard.
In computing, a page cache, sometimes also called disk cache, is a transparent cache for the pages originating from a secondary storage device such as a hard disk drive (HDD) or a solid-state drive (SSD). The operating system keeps a page cache in otherwise unused portions of the main memory (RAM), resulting in quicker access to the contents of cached pages and overall performance improvements. A page cache is implemented in kernels with the paging memory management, and is mostly transparent to applications.
Bubble sort, sometimes referred to as sinking sort, is a simple sorting algorithm that repeatedly steps through the list, compares adjacent elements and swaps them if they are in the wrong order. The pass through the list is repeated until the list is sorted. The algorithm, which is a comparison sort, is named for the way smaller or larger elements "bubble" to the top of the list. Although the algorithm is simple, it is too slow and impractical for most problems even when compared to insertion sort. Bubble sort can be practical if the input is in mostly sorted order with some out-of-order elements nearly in position.
A Block Range Index or BRIN is a database indexing technique. They are intended to improve performance with extremely large tables.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.