Drawing showing how a Kapitza pendulum can be constructed: a motor rotates a crank at a high speed, the crank vibrates a lever arm up and down, which the pendulum is attached to with a pivot.
Kapitza's pendulum or Kapitza pendulum is a rigid pendulum in which the pivot point vibrates in a vertical direction, up and down. It is named after Russian Nobel laureate physicist Pyotr Kapitza, who in 1951 developed a theory which successfully explains some of its unusual properties.[1] The unique feature of the Kapitza pendulum is that the vibrating suspension can cause it to balance stably in an inverted position, with the bob above the suspension point. In the usual pendulum with a fixed suspension, the only stable equilibrium position is with the bob hanging below the suspension point; the inverted position is a point of unstable equilibrium, and the smallest perturbation moves the pendulum out of equilibrium. In nonlinear control theory the Kapitza pendulum is used as an example of a parametric oscillator that demonstrates the concept of "dynamic stabilization".
The pendulum was first described by A. Stephenson in 1908, who found that the upper vertical position of the pendulum might be stable when the driving frequency is fast.[2] Yet until the 1950s there was no explanation for this highly unusual and counterintuitive phenomenon. Pyotr Kapitza was the first to analyze it in 1951.[1] He carried out a number of experimental studies and as well provided an analytical insight into the reasons of stability by splitting the motion into "fast" and "slow" variables and by introducing an effective potential. This innovative work created a new subject in physics – vibrational mechanics. Kapitza's method is used for description of periodic processes in atomic physics, plasma physics and cybernetical physics. The effective potential which describes the "slow" component of motion is described in "Mechanics" volume (§30) of Landau's Course of Theoretical Physics.[3]
Another interesting feature of the Kapitza pendulum system is that the bottom equilibrium position, with the pendulum hanging down below the pivot, is no longer stable. Any tiny deviation from the vertical increases in amplitude with time.[4]Parametric resonance can also occur in this position, and chaotic regimes can be realized in the system when strange attractors are present in the Poincaré section.[5]
Notation
Kapitza's pendulum scheme
Denote the vertical axis as and the horizontal axis as so that the motion of pendulum happens in the (-) plane. The following notation will be used
—frequency of the vertical oscillations of the suspension,
— amplitude of the oscillations of the suspension,
— proper frequency of the mathematical pendulum,
— free fall acceleration,
— length of rigid and light pendulum,
— mass.
Denoting the angle between pendulum and downward direction as the time dependence of the position of pendulum gets written as
Energy
The potential energy of the pendulum is due to gravity and is defined by, in terms of the vertical position, as
The kinetic energy in addition to the standard term , describing velocity of a mathematical pendulum, there is a contribution due to vibrations of the suspension
The total energy is given by the sum of the kinetic and potential energies and the Lagrangian by their difference .
The total energy is conserved in a mathematical pendulum, so time dependence of the potential and kinetic energies is symmetric with respect to the horizontal line. According to the virial theorem the mean kinetic and potential energies in harmonic oscillator are equal. This means that the line of symmetry corresponds to half of the total energy.
In the case of vibrating suspension the system is no longer a closed one and the total energy is no longer conserved. The kinetic energy is more sensitive to vibration compared to the potential one. The potential energy is bound from below and above while the kinetic energy is bound only from below . For high frequency of vibrations the kinetic energy can be large compared to the potential energy.
Equations of motion
Motion of pendulum satisfies Euler–Lagrange equations. The dependence of the phase of the pendulum on its position satisfies the equation:[6]
where the Lagrangian reads
up to irrelevant total time derivative terms. The differential equation
which describes the movement of the pendulum is nonlinear due to the factor.
Equilibrium positions
Kapitza's pendulum model is more general than the simple pendulum. The Kapitza model reduces to the latter in the limit . In that limit, the tip of the pendulum describes a circle: . If the energy in the initial moment is larger than the maximum of the potential energy then the trajectory will be closed and cyclic. If the initial energy is smaller then the pendulum will oscillate close to the only stable point .
When the suspension is vibrating with a small amplitude and with a frequency much higher than the proper frequency , the angle may be viewed as a superposition of a "slow" component and a rapid oscillation with small amplitude due to the small but rapid vibrations of the suspension. Technically, we perform a perturbative expansion in the "coupling constants" while treating the ratio as fixed. The perturbative treatment becomes exact in the double scaling limit. More precisely, the rapid oscillation is defined as
The equation of motion for the "slow" component becomes
Time-averaging over the rapid -oscillation yields to leading order
It turns out[1] that the effective potential has two minima if , or equivalently, . The first minimum is in the same position as the mathematical pendulum and the other minimum is in the upper vertical position . As a result the upper vertical position, which is unstable in a mathematical pendulum, can become stable in Kapitza's pendulum.
Bifurcation and chaos
For fixed forcing frequency , and increasing forcing amplitude , the inverted point becomes a stable equilibrium, and then it would become unstable again. The point undergoes a Hopf bifurcation: the stable equilibrium expands into a stable oscillation around , at frequency , and amplitude where is the critical amplitude.[5]
For even larger amplitude, the stable oscillation becomes unstable, and the pendulum would start rotating. At even larger amplitudes, the rotating mode is also destroyed, and a strange attractor appears by period-doubling cascade.[7][8]
Rotating solutions
The rotating solutions of the Kapitza's pendulum occur when the pendulum rotates around the pivot point at the same frequency that the pivot point is driven. There are two rotating solutions, one for a rotation in each direction. We shift to the rotating reference frame using and the equation for becomes:
Again considering the limit in which is much higher than the proper frequency , we find that the rapid- slow- limit leads to the equation:
The effective potential is just that of a simple pendulum equation. There is a stable equilibrium at and an unstable equilibrium at .
Phase portrait
Interesting phase portraits might be obtained in regimes which are not accessible within analytic descriptions, for example in the case of large amplitude of the suspension .[9][10] Increasing the amplitude of driving oscillations to half of the pendulum length leads to the phase portrait shown in the figure.[clarification needed]
Further increase of the amplitude to leads to full filling of the internal points of the phase space: if before some points of the phase space were not accessible, now system can reach any of the internal points. This situation holds also for larger values of .
Interesting facts
Kapitza noted that a pendulum clock with a vibrating pendulum suspension always goes faster than a clock with a fixed suspension.[11]
Walking is defined by an 'inverted pendulum' gait in which the body vaults over the stiff limb or limbs with each step. Increased stability during walking might be related to stability of Kapitza's pendulum. This applies regardless of the number of limbs - even arthropods with six, eight or more limbs.[12]
In classical mechanics, a harmonic oscillator is a system that, when displaced from its equilibrium position, experiences a restoring force F proportional to the displacement x:
Oscillation is the repetitive or periodic variation, typically in time, of some measure about a central value or between two or more different states. Familiar examples of oscillation include a swinging pendulum and alternating current. Oscillations can be used in physics to approximate complex interactions, such as those between atoms.
In mechanics and physics, simple harmonic motion is a special type of periodic motion an object experiences due to a restoring force whose magnitude is directly proportional to the distance of the object from an equilibrium position and acts towards the equilibrium position. It results in an oscillation that is described by a sinusoid which continues indefinitely.
In mathematics, a spherical coordinate system is a coordinate system for three-dimensional space where the position of a given point in space is specified by three numbers, : the radial distance of the radial liner connecting the point to the fixed point of origin ; the polar angle θ of the radial line r; and the azimuthal angle φ of the radial line r.
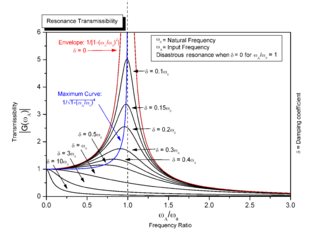
Resonance is the phenomenon, pertaining to oscillatory dynamical systems, wherein amplitude rises are caused by an external force with time-varying amplitude with the same frequency of variation as the natural frequency of the system. The amplitude rises that occur are a result of the fact that applied external forces at the natural frequency entail a net increase in mechanical energy of the system.
The Navier–Stokes equations are partial differential equations which describe the motion of viscous fluid substances. They were named after French engineer and physicist Claude-Louis Navier and the Irish physicist and mathematician George Gabriel Stokes. They were developed over several decades of progressively building the theories, from 1822 (Navier) to 1842–1850 (Stokes).
Noether's theorem states that every continuous symmetry of the action of a physical system with conservative forces has a corresponding conservation law. This is the first of two theorems proven by mathematician Emmy Noether in 1915 and published in 1918. The action of a physical system is the integral over time of a Lagrangian function, from which the system's behavior can be determined by the principle of least action. This theorem only applies to continuous and smooth symmetries of physical space.
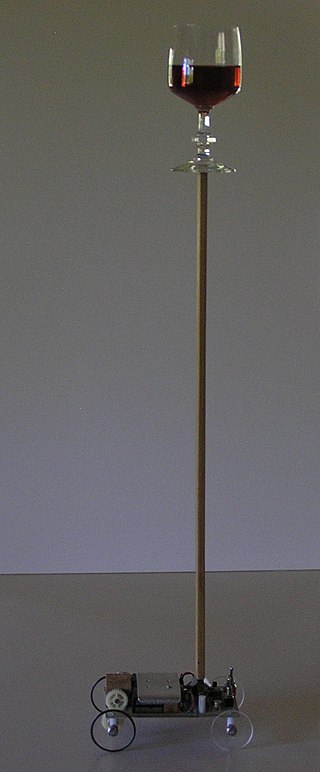
An inverted pendulum is a pendulum that has its center of mass above its pivot point. It is unstable and falls over without additional help. It can be suspended stably in this inverted position by using a control system to monitor the angle of the pole and move the pivot point horizontally back under the center of mass when it starts to fall over, keeping it balanced. The inverted pendulum is a classic problem in dynamics and control theory and is used as a benchmark for testing control strategies. It is often implemented with the pivot point mounted on a cart that can move horizontally under control of an electronic servo system as shown in the photo; this is called a cart and pole apparatus. Most applications limit the pendulum to 1 degree of freedom by affixing the pole to an axis of rotation. Whereas a normal pendulum is stable when hanging downward, an inverted pendulum is inherently unstable, and must be actively balanced in order to remain upright; this can be done either by applying a torque at the pivot point, by moving the pivot point horizontally as part of a feedback system, changing the rate of rotation of a mass mounted on the pendulum on an axis parallel to the pivot axis and thereby generating a net torque on the pendulum, or by oscillating the pivot point vertically. A simple demonstration of moving the pivot point in a feedback system is achieved by balancing an upturned broomstick on the end of one's finger.
The sine-Gordon equation is a nonlinear hyperbolic partial differential equation for a function dependent on two variables typically denoted and , involving the wave operator and the sine of .
A normal mode of a dynamical system is a pattern of motion in which all parts of the system move sinusoidally with the same frequency and with a fixed phase relation. The free motion described by the normal modes takes place at fixed frequencies. These fixed frequencies of the normal modes of a system are known as its natural frequencies or resonant frequencies. A physical object, such as a building, bridge, or molecule, has a set of normal modes and their natural frequencies that depend on its structure, materials and boundary conditions.
In physics and astronomy, the Reissner–Nordström metric is a static solution to the Einstein–Maxwell field equations, which corresponds to the gravitational field of a charged, non-rotating, spherically symmetric body of mass M. The analogous solution for a charged, rotating body is given by the Kerr–Newman metric.
In applied mechanics, bending characterizes the behavior of a slender structural element subjected to an external load applied perpendicularly to a longitudinal axis of the element.
In the mathematical theory of bifurcations, a Hopfbifurcation is a critical point where, as a parameter changes, a system's stability switches and a periodic solution arises. More accurately, it is a local bifurcation in which a fixed point of a dynamical system loses stability, as a pair of complex conjugate eigenvalues—of the linearization around the fixed point—crosses the complex plane imaginary axis as a parameter crosses a threshold value. Under reasonably generic assumptions about the dynamical system, the fixed point becomes a small-amplitude limit cycle as the parameter changes.
A pendulum is a body suspended from a fixed support so that it swings freely back and forth under the influence of gravity. When a pendulum is displaced sideways from its resting, equilibrium position, it is subject to a restoring force due to gravity that will accelerate it back towards the equilibrium position. When released, the restoring force acting on the pendulum's mass causes it to oscillate about the equilibrium position, swinging it back and forth. The mathematics of pendulums are in general quite complicated. Simplifying assumptions can be made, which in the case of a simple pendulum allow the equations of motion to be solved analytically for small-angle oscillations.
In general relativity, Lense–Thirring precession or the Lense–Thirring effect is a relativistic correction to the precession of a gyroscope near a large rotating mass such as the Earth. It is a gravitomagnetic frame-dragging effect. It is a prediction of general relativity consisting of secular precessions of the longitude of the ascending node and the argument of pericenter of a test particle freely orbiting a central spinning mass endowed with angular momentum .
In mathematics, the cylindrical harmonics are a set of linearly independent functions that are solutions to Laplace's differential equation, , expressed in cylindrical coordinates, ρ (radial coordinate), φ (polar angle), and z (height). Each function Vn(k) is the product of three terms, each depending on one coordinate alone. The ρ-dependent term is given by Bessel functions (which occasionally are also called cylindrical harmonics).
In mathematical physics, the Hunter–Saxton equation
In fluid dynamics, the Oseen equations describe the flow of a viscous and incompressible fluid at small Reynolds numbers, as formulated by Carl Wilhelm Oseen in 1910. Oseen flow is an improved description of these flows, as compared to Stokes flow, with the (partial) inclusion of convective acceleration.
In classical mechanics, the central-force problem is to determine the motion of a particle in a single central potential field. A central force is a force that points from the particle directly towards a fixed point in space, the center, and whose magnitude only depends on the distance of the object to the center. In a few important cases, the problem can be solved analytically, i.e., in terms of well-studied functions such as trigonometric functions.
In physics, a sinusoidal plane wave is a special case of plane wave: a field whose value varies as a sinusoidal function of time and of the distance from some fixed plane. It is also called a monochromatic plane wave, with constant frequency.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.