Amputation is the removal of a limb by trauma, medical illness, or surgery. As a surgical measure, it is used to control pain or a disease process in the affected limb, such as malignancy or gangrene. In some cases, it is carried out on individuals as a preventative surgery for such problems. A special case is that of congenital amputation, a congenital disorder, where fetal limbs have been cut off by constrictive bands. In some countries, amputation of the hands, feet or other body parts is or was used as a form of punishment for people who committed crimes. Amputation has also been used as a tactic in war and acts of terrorism; it may also occur as a war injury. In some cultures and religions, minor amputations or mutilations are considered a ritual accomplishment.

A tremor is an involuntary, somewhat rhythmic, muscle contraction and relaxation involving oscillations or twitching movements of one or more body parts. It is the most common of all involuntary movements and can affect the hands, arms, eyes, face, head, vocal folds, trunk, and legs. Most tremors occur in the hands. In some people, a tremor is a symptom of another neurological disorder. A very common tremor is the teeth chattering, usually induced by cold temperatures or by fear.

In medicine, a prosthesis or prosthetic implant is an artificial device that replaces a missing body part, which may be lost through trauma, disease, or a condition present at birth. Prostheses are intended to restore the normal functions of the missing body part. Amputee rehabilitation is primarily coordinated by a physiatrist as part of a inter-disciplinary team consisting of physiatrists, prosthetists, nurses, physical therapists, and occupational therapists. Prostheses can be created by hand or with CAD, a software interface that helps creators visualize the creation in a 3D form.
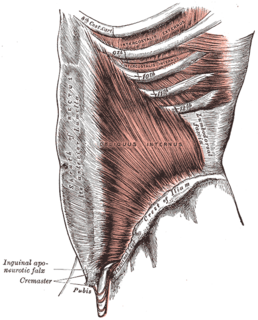
A fascia is a band or sheet of connective tissue, primarily collagen, beneath the skin that attaches, stabilizes, encloses, and separates muscles and other internal organs. Fascia is classified by layer, as superficial fascia, deep fascia, and visceral or parietal fascia, or by its function and anatomical location.

Electromyography (EMG) is an electrodiagnostic medicine technique for evaluating and recording the electrical activity produced by skeletal muscles. EMG is performed using an instrument called an electromyograph to produce a record called an electromyogram. An electromyograph detects the electric potential generated by muscle cells when these cells are electrically or neurologically activated. The signals can be analyzed to detect medical abnormalities, activation level, or recruitment order, or to analyze the biomechanics of human or animal movement.
Human–machine system is a system in which the functions of a human operator and a machine are integrated. This term can also be used to emphasize the view of such a system as a single entity that interacts with external environment.
Neuroprosthetics is a discipline related to neuroscience and biomedical engineering concerned with developing neural prostheses. They are sometimes contrasted with a brain–computer interface, which connects the brain to a computer rather than a device meant to replace missing biological functionality.
Prosthetics, the artificial replacement of organic limbs or organs, often play a role in fiction, particularly science fiction, as either plot points or to give a character a beyond normal appearance. Numerous works of literature, television, and films feature characters who have prosthetics attached.
Biomechatronics is an applied interdisciplinary science that aims to integrate biology, mechanics, and electronics. It also encompasses the fields of robotics and neuroscience. Biomechatronic devices encompass a wide range of applications from the development of prosthetic limbs to engineering solutions concerning respiration, vision, and the cardiovascular system.

A nerve plexus is a plexus of intersecting nerves. A nerve plexus is composed of afferent and efferent fibers that arise from the merging of the anterior rami of spinal nerves and blood vessels. There are five spinal nerve plexuses, except in the thoracic region, as well as other forms of autonomic plexuses, many of which are a part of the enteric nervous system. The nerves that arise from the plexuses have both sensory and motor functions. These functions include muscle contraction, the maintenance of body coordination and control, and the reaction to sensations such as heat, cold, pain, and pressure. There are several plexuses in the body, including:

Dog anatomy comprises the anatomical studies of the visible parts of the body of a canine. Details of structures vary tremendously from breed to breed, more than in any other animal species, wild or domesticated, as dogs are highly variable in height and weight. The smallest known adult dog was a Yorkshire Terrier that stood only 6.3 cm (2.5 in) at the shoulder, 9.5 cm (3.7 in) in length along the head and body, and weighed only 113 grams (4.0 oz). The largest known adult dog was an English Mastiff which weighed 155.6 kg (343 lb) and was 250 cm (98 in) from the snout to the tail. The tallest known adult dog is a Great Dane that stands 106.7 cm (42.0 in) at the shoulder.

Foot drop is a gait abnormality in which the dropping of the forefoot happens due to weakness, irritation or damage to the common fibular nerve including the sciatic nerve, or paralysis of the muscles in the anterior portion of the lower leg. It is usually a symptom of a greater problem, not a disease in itself. Foot drop is characterized by inability or impaired ability to raise the toes or raise the foot from the ankle (dorsiflexion). Foot drop may be temporary or permanent, depending on the extent of muscle weakness or paralysis and it can occur in one or both feet. In walking, the raised leg is slightly bent at the knee to prevent the foot from dragging along the ground.
A nerve root is the initial segment of a nerve leaving the central nervous system. Types include:

A mechanical arm is a machine that mimics the action of a human arm. Mechanical arms are composed of multiple beams connected by hinges powered by actuators. One end of the arm is attached to a firm base while the other has a tool. They can be controlled by humans either directly or over a distance. A computer-controlled mechanical arm is called a robotic arm. However, a robotic arm is just one of many types of different mechanical arms.
Targeted reinnervation enables amputees to control motorized prosthetic devices and to regain sensory feedback. The method was developed by Dr. Todd Kuiken at Northwestern University and Rehabilitation Institute of Chicago and Dr. Gregory Dumanian at Northwestern University Division of Plastic Surgery.

A leg is a weight-bearing and locomotive anatomical structure, usually having a columnar shape. During locomotion, legs function as "extensible struts". The combination of movements at all joints can be modeled as a single, linear element capable of changing length and rotating about an omnidirectional "hip" joint.
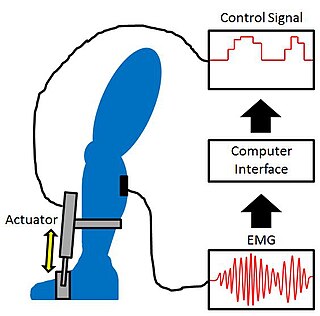
Proportional myoelectric control can be used to activate robotic lower limb exoskeletons. A proportional myoelectric control system utilizes a microcontroller or computer that inputs electromyography (EMG) signals from sensors on the leg muscle(s) and then activates the corresponding joint actuator(s) proportionally to the EMG signal.
Robotic prosthesis control is a method for controlling a prosthesis in such a way that the controlled robotic prosthesis restores a biologically accurate gait to a person with a loss of limb. This is special branch of control that has an emphasis on the interaction between humans and robotics.

Gait deviations are nominally referred to as any variation of standard human gait, typically manifesting as a coping mechanism in response to an anatomical impairment. Lower-limb amputees are unable to maintain the characteristic walking patterns of an able-bodied individual due to the removal of some portion of the impaired leg. Without the anatomical structure and neuromechanical control of the removed leg segment, amputees must use alternative compensatory strategies to walk efficiently. Prosthetic limbs provide support to the user and more advanced models attempt to mimic the function of the missing anatomy, including biomechanically controlled ankle and knee joints. However, amputees still display quantifiable differences in many measures of ambulation when compared to able-bodied individuals. Several common observations are whole-body movements, slower and wider steps, shorter strides, and increased sway.



