Related Research Articles
In geometry, every polyhedron is associated with a second dual structure, where the vertices of one correspond to the faces of the other, and the edges between pairs of vertices of one correspond to the edges between pairs of faces of the other. Such dual figures remain combinatorial or abstract polyhedra, but not all can also be constructed as geometric polyhedra. Starting with any given polyhedron, the dual of its dual is the original polyhedron.

In geometry, a polyhedron is a three-dimensional shape with flat polygonal faces, straight edges and sharp corners or vertices.

A convex polytope is a special case of a polytope, having the additional property that it is also a convex set contained in the -dimensional Euclidean space . Most texts use the term "polytope" for a bounded convex polytope, and the word "polyhedron" for the more general, possibly unbounded object. Others allow polytopes to be unbounded. The terms "bounded/unbounded convex polytope" will be used below whenever the boundedness is critical to the discussed issue. Yet other texts identify a convex polytope with its boundary.
In five-dimensional geometry, a 5-cube is a name for a five-dimensional hypercube with 32 vertices, 80 edges, 80 square faces, 40 cubic cells, and 10 tesseract 4-faces.
In mathematics, specifically in combinatorial commutative algebra, a convex lattice polytope P is called normal if it has the following property: given any positive integer n, every lattice point of the dilation nP, obtained from P by scaling its vertices by the factor n and taking the convex hull of the resulting points, can be written as the sum of exactly n lattice points in P. This property plays an important role in the theory of toric varieties, where it corresponds to projective normality of the toric variety determined by P. Normal polytopes have popularity in algebraic combinatorics. These polytopes also represent the homogeneous case of the Hilbert bases of finite positive rational cones and the connection to algebraic geometry is that they define projectively normal embeddings of toric varieties.
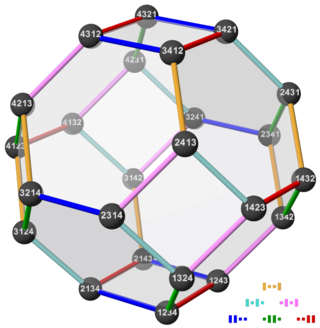
In mathematics, the permutohedron (also spelled permutahedron) of order n is an (n − 1)-dimensional polytope embedded in an n-dimensional space. Its vertex coordinates (labels) are the permutations of the first n natural numbers. The edges identify the shortest possible paths (sets of transpositions) that connect two vertices (permutations). Two permutations connected by an edge differ in only two places (one transposition), and the numbers on these places are neighbors (differ in value by 1).
In mathematics, the vertex enumeration problem for a polytope, a polyhedral cell complex, a hyperplane arrangement, or some other object of discrete geometry, is the problem of determination of the object's vertices given some formal representation of the object. A classical example is the problem of enumeration of the vertices of a convex polytope specified by a set of linear inequalities:
Polyhedral combinatorics is a branch of mathematics, within combinatorics and discrete geometry, that studies the problems of counting and describing the faces of convex polyhedra and higher-dimensional convex polytopes.
In geometry and polyhedral combinatorics, an integral polytope is a convex polytope whose vertices all have integer Cartesian coordinates. That is, it is a polytope that equals the convex hull of its integer points. Integral polytopes are also called lattice polytopes or Z-polytopes. The special cases of two- and three-dimensional integral polytopes may be called polygons or polyhedra instead of polytopes, respectively.

In five-dimensional geometry, a rectified 5-orthoplex is a convex uniform 5-polytope, being a rectification of the regular 5-orthoplex.
In seven-dimensional geometry, a rectified 7-orthoplex is a convex uniform 7-polytope, being a rectification of the regular 7-orthoplex.
In eight-dimensional geometry, a rectified 8-orthoplex is a convex uniform 8-polytope, being a rectification of the regular 8-orthoplex.

In six-dimensional geometry, a rectified 6-orthoplex is a convex uniform 6-polytope, being a rectification of the regular 6-orthoplex.
In geometry, the moment curve is an algebraic curve in d-dimensional Euclidean space given by the set of points with Cartesian coordinates of the form
The McMullen problem is an open problem in discrete geometry named after Peter McMullen.
In geometry, a Hanner polytope is a convex polytope constructed recursively by Cartesian product and polar dual operations. Hanner polytopes are named after Olof Hanner, who introduced them in 1956.
In mathematics, the upper bound theorem states that cyclic polytopes have the largest possible number of faces among all convex polytopes with a given dimension and number of vertices. It is one of the central results of polyhedral combinatorics.

In polyhedral combinatorics, the hypersimplex is a convex polytope that generalizes the simplex. It is determined by two integers and , and is defined as the convex hull of the -dimensional vectors whose coefficients consist of ones and zeros. Equivalently, can be obtained by slicing the -dimensional unit hypercube with the hyperplane of equation and, for this reason, it is a -dimensional polytope when .

In 4-dimensional geometry, there are 9 uniform polytopes with A4 symmetry. There is one self-dual regular form, the 5-cell with 5 vertices.
Reverse-search algorithms are a class of algorithms for generating all objects of a given size, from certain classes of combinatorial objects. In many cases, these methods allow the objects to be generated in polynomial time per object, using only enough memory to store a constant number of objects. They work by organizing the objects to be generated into a spanning tree of their state space, and then performing a depth-first search of this tree.
References
- ↑ Ziegler, Günter M. (2000). "Lectures on 0/1-polytopes". Polytopes—combinatorics and computation (Oberwolfach, 1997). DMV Sem. Vol. 29. Basel: Birkhäuser. pp. 1–41. ISBN 3-7643-6351-7. MR 1785291.
- ↑ Grünbaum, Branko (2003). "4.9. Additional notes and comments". Convex Polytopes. Springer. p. 69a.
- ↑ Kaibel, Volker; Wolff, Martin (2000). "Simple 0/1-polytopes". European Journal of Combinatorics. 21 (1): 139–144. doi:10.1006/eujc.1999.0328. MR 1737334.
| | This geometry-related article is a stub. You can help Wikipedia by expanding it. |