
Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels.
Side-scan sonar is a category of sonar system that is used to efficiently create an image of large areas of the sea floor.

The Sikorsky SH-60/MH-60 Seahawk is a twin turboshaft engine, multi-mission United States Navy helicopter based on the United States Army UH-60 Black Hawk and a member of the Sikorsky S-70 family. The most significant modifications are the folding main rotor blades and a hinged tail to reduce its footprint aboard ships.

A littoral combat ship (LCS) is either of two classes of relatively small surface vessels designed for near-shore operations by the United States Navy. It was "envisioned to be a networked, agile, stealthy surface combatant capable of defeating anti-access and asymmetric threats in the littorals", although their ability to perform these missions in practice has been called into question.

The Hunt class is a class of thirteen mine countermeasure vessels of the Royal Navy. As built, they combined the separate roles of the traditional minesweeper and that of the active minehunter in one hull, but later modifications saw the removal of mine-sweeping equipment. They have a secondary role as offshore patrol vessels.
Thales Underwater Systems or TUS is a subsidiary of the French defense electronics specialist Thales Group. It was founded in 2001 and belongs to its naval division. It specializes in the development and manufacturing of sonar systems for submarines, surface warships and aircraft, as well as communications masts and systems for submarines. Its headquarters are located in Sophia Antipolis, France.
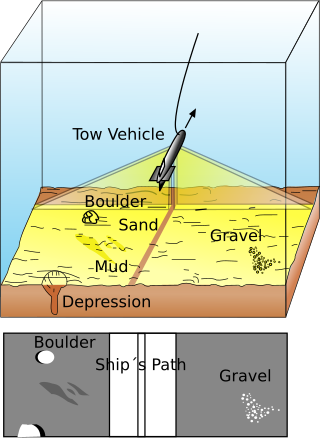
The AN/SQQ-32 minehunting sonar set (MSS) is a variable-depth mine-hunting sonar system originally developed by Raytheon and Thales Underwater Systems for the United States Navy. It includes two separate active sonar systems to detect and classify mine-like objects on the surface, in the volume, or on the bottom of the sea. The sonar systems are packaged in a single towed body tethered to the ship through a cable providing power and data transmission, with the cable length variable via an electric winch. A hole in the ship extending from the sonar maintenance room (SMR) to the hull allows movement of the towed body in different configurations for maintenance, stowage at sea, and minehunting operations. The towed body can be configured for minehunting by either locking to the bottom of the ship's hull for shallow water operations, or by extending and retracting the tow cable to allow for variable depth sonar (VDS) operations. VDS operations are necessary in deep water due to refraction of the sonar from the various temperature layers present in the ocean; with the sonar positioned in the same thermal layer as the suspected mines the error induced by refraction is minimized. The detect and classify sonar subsystems are independently monitored and controlled by two operators at independent panels working together to find and characterize underwater objects as mine or non-mine like objects.

Unmanned underwater vehicles (UUV), also known as uncrewed underwater vehicles and underwater drones, are submersible vehicles that can operate underwater without a human occupant. These vehicles may be divided into two categories: remotely operated underwater vehicles (ROUVs) and autonomous underwater vehicles (AUVs). ROUVs are remotely controlled by a human operator. AUVs are automated and operate independently of direct human input.

A mine countermeasures vessel or MCMV is a type of naval ship designed for the location of and destruction of naval mines which combines the role of a minesweeper and minehunter in one hull. The term MCMV is also applied collectively to minehunters and minesweepers.

The Tripartite class is a class of minehunters developed from an agreement between the navies of Belgium, France and the Netherlands. A total of 35 ships were constructed for the three navies. The class was constructed in the 1980s–1990s in all three countries, using a mix of minehunting, electrical and propulsion systems from the three member nations. In France, where they are known as the Éridan class they are primarily used as minehunters, but have been used for minesweeping and ammunition transport in Belgium and the Netherlands, where the Tripartites are known as the Alkmaar class.
Geophysical MASINT is a branch of Measurement and Signature Intelligence (MASINT) that involves phenomena transmitted through the earth and manmade structures including emitted or reflected sounds, pressure waves, vibrations, and magnetic field or ionosphere disturbances.

Avenger-class mine countermeasures ships are a class of 14 ships constructed for the United States Navy from 1987 to 1994, designed to clear mines from vital waterways. The ships have the hull designator MCM.

The Bedok class are mine countermeasures vessels of the Republic of Singapore Navy (RSN). They play an important role in the maritime security of Singapore, ensuring that the Singapore Strait and the sea lanes surrounding Singapore remain mine-free and open to international shipping. It is estimated that closure of Singapore's ports would result in direct trade losses amounting to more than US$1.2 billion daily, posing a serious threat to Singapore's economy. The four ships form the Sixth Flotilla of the RSN.

Helicopter Mine Countermeasures Squadron 14 (HM-14) was a United States Navy helicopter squadron established in 1978 based at Naval Station Norfolk, Virginia. Nicknamed the Vanguard and flying the MH-53E Sea Dragon, it comprised both active duty and reserve personnel. It was the sister squadron to HM-15, the Blackhawks, based at NS Norfolk.

The Lockheed Martin AN/WLD-1 RMS is a remotely controlled minesweeping system to be operated by surface warships. It consists of an unmanned semisubmersible vehicle, which tows a sonar array, and control infrastructure aboard the parent ship. The unmanned semisubmersible vehicle used is the US Navy Snorkeler-Class Unmanned Surface Vehicle.

The Fleet-class unmanned surface vessel, also called the Common Unmanned Surface Vessel (CUSV) and later the Mine Countermeasures Unmanned Surface Vehicle, is an unmanned surface vessel designed for the United States Navy to be deployed from Freedom and Independence-class littoral combat ships and intended to conduct mine and anti-submarine warfare missions. As of 2012 four units of the class have been built; the first was delivered to the U.S. Navy in 2008.

The REMUS series are autonomous underwater vehicles (AUVs) made by the Woods Hole Oceanographic Institution and designed by their Oceanographic Systems Lab (OSL). More recently REMUS vehicles have been manufactured by the spinoff company Hydroid Inc, which was a wholly owned subsidiary of Kongsberg Maritime. Hydroid was acquired by Huntington Ingalls Industries (HHI) in March 2020. The series are designed to be low cost, they have shared control software and electronic subsystems and can be operated from a laptop computer. They are used by civilians for seafloor mapping, underwater surveying, and search and recovery as well as by several navies for mine countermeasures missions.

The SeaFox is an anti-mine Unmanned underwater vehicle (UUV) manufactured by German company Atlas Elektronik. It is designed to locate and destroy ground and moored mines. There are three versions, including a training version. The orange SeaFox-I "inspection" variant has sonar and an Inertial navigation system, and the black SeaFox-C "combat" round also has a 1.4 kilograms (3.1 lb) shaped charge warhead. The system is in service with eleven navies. The SeaFox is an advanced design of an Expendable Mine Disposal Vehicle or EMDV. It has a low life cycle cost as it has low running and replacement costs. Its main targets are sea mines that pose a danger to vessels. It communicates with the ship via a fiber-optic cable. The SeaFox uses a custom launch and retrieval system, that may be fitted to a variety of ships, boats or even helicopters. It can be used for a range of tasks such as conduct damage estimation, route surveys, maritime boundary control, intelligence and harbor surveillance missions.
The Knifefish is an autonomous unmanned underwater vehicle (UUV) under development by General Dynamics Mission Systems and Bluefin Robotics for the United States Navy. It is a propeller-driven minesweeping robot designed to replace the Navy's trained dolphins and sea lions after the retirement of the 50-year-old Marine Mammal Program in 2017. The Knifefish was first unveiled at a Navy exposition in April 2012, and was originally intended to operate in concert with the Navy's littoral combat ships (LCS) as part of a specialized counter-mine system.

The AN/AQS-13 series was a helicopter dipping sonar system for the United States Navy. These systems were deployed as the primary inner zone anti-submarine warfare (ASW) sensor on aircraft carrier based helicopters for over five decades. Companion versions with the AQS-18 designation were exported to various nations around the globe.
