
A spacecraft is a vehicle that is designed to fly in outer space. A type of artificial satellite, spacecraft are used for a variety of purposes, including communications, Earth observation, meteorology, navigation, space colonization, planetary exploration, and transportation of humans and cargo. All spacecraft except single-stage-to-orbit vehicles cannot get into space on their own, and require a launch vehicle.
An autonomous robot is a robot that acts without recourse to human control. The first autonomous robots environment were known as Elmer and Elsie, which were constructed in the late 1940s by W. Grey Walter. They were the first robots in history that were programmed to "think" the way biological brains do and meant to have free will. Elmer and Elsie were often labeled as tortoises because of how they were shaped and the manner in which they moved. They were capable of phototaxis which is the movement that occurs in response to light stimulus.
Robotic control is the system that contributes to the movement of robots. This involves the mechanical aspects and programmable systems that makes it possible to control robots. Robotics could be controlled in various ways, which includes using manual control, wireless control, semi-autonomous, and fully autonomous. In the present day, as technological advancements progress, robots and their methods of control continue to develop and advance.

Robotic spacecraft or uncrewed spacecraft are spacecraft without people on board. Uncrewed spacecraft may have varying levels of autonomy from human input; they may be remote controlled, remote guided or autonomous: they have a pre-programmed list of operations, which they will execute unless otherwise instructed. A robotic spacecraft for scientific measurements is often called a space probe or space observatory.

Telerobotics is the area of robotics concerned with the control of semi-autonomous robots from a distance, chiefly using television, wireless networks or tethered connections. It is a combination of two major subfields, which are teleoperation and telepresence.

A micro air vehicle (MAV), or micro aerial vehicle, is a class of miniature UAVs that has a size restriction and may be autonomous. Modern craft can be as small as 5 centimeters. Development is driven by commercial, research, government, and military purposes; with insect-sized aircraft reportedly expected in the future. The small craft allows remote observation of hazardous environments inaccessible to ground vehicles. MAVs have been built for hobby purposes such as aerial robotics contests and aerial photography.
The design of spacecraft covers a broad area, including the design of both robotic spacecraft, and spacecraft for human spaceflight.

A mobile robot is an automatic machine that is capable of locomotion. Mobile robotics is usually considered to be a subfield of robotics and information engineering.

Robot localization denotes the robot's ability to establish its own position and orientation within the frame of reference. Path planning is effectively an extension of localisation, in that it requires the determination of the robot's current position and a position of a goal location, both within the same frame of reference or coordinates. Map building can be in the shape of a metric map or any notation describing locations in the robot frame of reference.
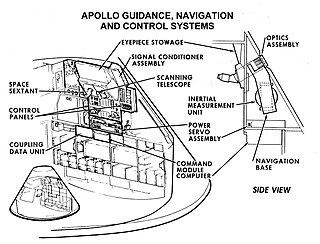
Guidance, navigation and control is a branch of engineering dealing with the design of systems to control the movement of vehicles, especially, automobiles, ships, aircraft, and spacecraft. In many cases these functions can be performed by trained humans. However, because of the speed of, for example, a rocket's dynamics, human reaction time is too slow to control this movement. Therefore, systems—now almost exclusively digital electronic—are used for such control. Even in cases where humans can perform these functions, it is often the case that GNC systems provide benefits such as alleviating operator work load, smoothing turbulence, fuel savings, etc. In addition, sophisticated applications of GNC enable automatic or remote control.
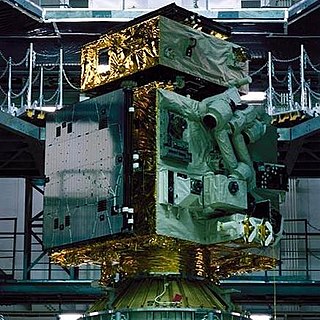
The ETS-VII, or Engineering Test Satellite No. 7, was a satellite developed and launched by the National Space Development Agency of Japan (NASDA). It is also known as KIKU-7. It was launched aboard an H-II rocket from Tanegashima Space Center, on 28 November 1997. The ETS-VII was equipped with a 2-meter-long (6.6 ft) robotic arm, which was used to carry out several experiments related to rendezvous docking and space robotics. It was the world's first satellite to be equipped with a robotic arm, and also Japan's first uncrewed spacecraft to conduct autonomous rendezvous and docking operations successfully, decades after the docking of the Soviet Kosmos 186 and Kosmos 188 spacecraft in 1967. Although it was originally intended to be used for 1.5 years, the satellite was functional for a period of almost five years. ETS-VII eventually decayed from orbit on 13 November 2015.

The Lunar Lander was a robotic mission intended to send a lander vehicle to the Moon, led by ESA's Human Spaceflight and Operations directorate. The primary objective of the Lunar Lander mission was to demonstrate Europe's ability to deliver payload safely and accurately to the Moon's surface. More specifically the mission would have demonstrated the technologies required to achieve a soft and precise landing while autonomously avoiding surface hazards that can endanger landing and surface mission safety. These technologies will be an asset for future human and robotic exploration missions. However the project was put on hold at the 2012 ESA Ministerial Council.

Docking and berthing of spacecraft is the joining of two space vehicles. This connection can be temporary, or partially permanent such as for space station modules.

Electra, formally called the Electra Proximity Link Payload, is a telecommunications package that acts as a communications relay and navigation aid for Mars spacecraft and rovers. The use of such a relay increases the amount of data that can be returned by two to three orders of magnitude.

Navcam, short for navigational camera, is a type of camera found on certain robotic rovers or spacecraft used for navigation without interfering with scientific instruments. Navcams typically take wide angle photographs that are used to plan the next moves of the vehicle or object tracking.

RSat-P is a microsatellite built by the United States Naval Academy (USNA) in Annapolis, Maryland. The small spacecraft is a 3U CubeSat intended to demonstrate capabilities for minor in-orbit repair of a much larger, conventional spacecraft.

Soyuz MS-14 was a Soyuz spaceflight to the International Space Station. It carried no crew members, as it was intended to test a modification of the launch abort system for integration with the Soyuz-2.1a launch vehicle. It launched successfully on 22 August 2019 at 03:38 UTC. It was the first mission of the Soyuz crew vehicle without a crew in 33 years, and the first ever unpiloted mission of Soyuz to the ISS.

CAPSTONE is a lunar orbiter that will test and verify the calculated orbital stability planned for the Lunar Gateway space station. The spacecraft is a 12-unit CubeSat that will also test a navigation system that will measure its position relative to NASA's Lunar Reconnaissance Orbiter (LRO) without relying on ground stations. It was launched on 28 June 2022, arrived in lunar orbit on 14 November 2022, and was scheduled to orbit for six months. On 18 May 2023, it completed its primary mission to orbit in the near-rectilinear halo orbit for six months, but will stay on this orbit, continuing to perform experiments during an enhanced mission phase.
Swati Mohan is an American aerospace engineer and was the Guidance and Controls Operations Lead on the NASA Mars 2020 mission.