
Koichi Wakata is a Japanese engineer and a JAXA astronaut. Wakata is a veteran of four NASA Space Shuttle missions, a Russian Soyuz mission, and a long-duration stay on the International Space Station. During a nearly two-decade career in spaceflight, he has logged more than eleven months in space. During Expedition 39, he became the first Japanese commander of the International Space Station. Wakata flew on the Soyuz TMA-11M/Expedition 38/Expedition 39 long duration spaceflight from 7 November 2013 to 13 May 2014. During this spaceflight he was accompanied by Kirobo, the first humanoid robot astronaut. As of 2023, he is the longest active astronaut in the world.

The German Aerospace Center is the national center for aerospace, energy and transportation research of Germany, founded in 1969. It is headquartered in Cologne with 35 locations throughout Germany. The DLR is engaged in a wide range of research and development projects in national and international partnerships. DLR also acts as the German space agency and is responsible for planning and implementing the German space programme on behalf of the German federal government. As a project management agency, DLR coordinates and answers the technical and organisational implementation of projects funded by a number of German federal ministries. As of 2020, the German Aerospace Center had a national budget of €1.348 billion.
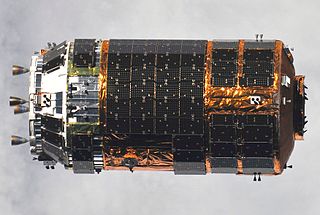
The H-II Transfer Vehicle (HTV), also called Kounotori, is an expendable, automated cargo spacecraft used to resupply the Kibō Japanese Experiment Module (JEM) and the International Space Station (ISS). The Japan Aerospace Exploration Agency (JAXA) has been working on the design since the early 1990s. The first mission, HTV-1, was originally intended to be launched in 2001. It launched at 17:01 UTC on 10 September 2009 on an H-IIB launch vehicle. The name Kounotori was chosen for the HTV by JAXA because "a white stork carries an image of conveying an important thing, therefore, it precisely expresses the HTV's mission to transport essential materials to the ISS". The HTV is very important for resupplying the ISS because after the retirement of the Space Shuttle it is the only vehicle that can transfer new 41.3 in (105 cm) wide International Standard Payload Racks (ISPRs) and dispose old ISPRs that can fit the 51 in (130 cm) wide tunnels between modules in the US Orbital Segment.

Dextre, also known as the Special Purpose Dexterous Manipulator (SPDM), is a two-armed robot, or telemanipulator, which is part of the Mobile Servicing System on the International Space Station (ISS), and does repairs that would otherwise require astronauts to do spacewalks. It was launched on March 11, 2008, on the mission STS-123.

A robonaut is a humanoid robot, part of a development project conducted by the Dexterous Robotics Laboratory at NASA's Lyndon B. Johnson Space Center (JSC) in Houston, Texas. Robonaut differs from other current space-faring robots in that, while most current space robotic systems are designed to move large objects, Robonaut's tasks require more dexterity.

Flight controllers are personnel who aid space flight by working in such Mission Control Centers as NASA's Mission Control Center or ESA's European Space Operations Centre. Flight controllers work at computer consoles and use telemetry to monitor various technical aspects of a space mission in real-time. Each controller is an expert in a specific area and constantly communicates with additional experts in the "back room". The flight director, who leads the flight controllers, monitors the activities of a team of flight controllers, and has overall responsibility for success and safety.

Akihiko Hoshide is a Japanese engineer, JAXA astronaut, and former commander of the International Space Station. On August 30, 2012, Hoshide became the third Japanese astronaut to walk in space.

Alexander Gerst is a German European Space Agency astronaut and geophysicist, who was selected in 2009 to take part in space training. He was part of the International Space Station Expedition 40 and 41 from May to November 2014. Gerst returned to space on 6 June 2018, as part of Expedition 56/57. He was the Commander of the International Space Station. He returned to Earth on 20 December 2018. After the end of his second mission and before being surpassed by Luca Parmitano in 2020, he held the record for most time in space of any active ESA astronaut, succeeding Italian astronaut Paolo Nespoli, and German ESA astronaut Thomas Reiter, who formally held the record for the longest time in space for any active or retired ESA astronaut.

Michael Scott Hopkins is a United States Space Force colonel and a former NASA astronaut. Hopkins was selected in June 2009 as a member of the NASA Astronaut Group 20. He made his first spaceflight as a Flight Engineer on Soyuz TMA-10M/Expedition 37/Expedition 38, from September 2013 until March 2014. He is the first member of his astronaut class to fly in space. Hopkins is the first astronaut to transfer to the U.S. Space Force, participating in a transfer ceremony on the International Space Station. Prior to his transfer, he served over 27 years in the United States Air Force.

HTV-1, also known as the HTV Demonstration Flight or HTV Technical Demonstration Vehicle, was the first flight of the Japanese Space Agency (JAXA) H-II Transfer Vehicle, launched in September 2009 to resupply the International Space Station and support the JAXA Kibō module or Japanese Experiment Module (JEM). It was an uncrewed cargo spacecraft carrying a mixture of pressurised and unpressurised cargo to the International Space Station. After a 52-day successful mission, HTV departed the ISS on 31 October 2009 after being released by the station's robotic arm. The spacecraft re-entered in the atmosphere of Earth on 1 November 2009 and disintegrated on re-entry as planned.

Justin is an autonomous and programmable humanoid robot with two arms, developed by the German Aerospace Center (DLR) at the Institute of Robotics and Mechatronics, located in Wessling, Germany. Introduced in 2009, this wireless robot is controllable through telepresence, a type of technology that allows a person to feel as if he or she were present from a location other than his or her true location.

Expedition 40 was the 40th expedition to the International Space Station. A portion of the Expedition 39 crew transferred to Expedition 40 while the remainder of the crew launched on May 28, 2014 from Baikonur Cosmodrome in Kazakhstan.

Astronaut training describes the complex process of preparing astronauts in regions around the world for their space missions before, during and after the flight, which includes medical tests, physical training, extra-vehicular activity (EVA) training, procedure training, rehabilitation process, as well as training on experiments they will accomplish during their stay in space.

Kounotori 3, also known as HTV-3, was the third flight of the Japanese H-II Transfer Vehicle. It was launched on 21 July 2012 to resupply the International Space Station (ISS) aboard the H-IIB Launch Vehicle No. 3 manufactured by Mitsubishi Heavy Industries (MHI) and JAXA. Kounotori 3 arrived at the ISS on 27 July 2012, and Expedition 32 Flight Engineer and JAXA astronaut Akihiko Hoshide used the International Space Station's Canadarm2 robotic arm to install Kounotori 3, to its docking port on the Earth-facing side (nadir) of the Harmony module at 14:34 UTC.

Kirobo is Japan's first robot astronaut, developed by University of Tokyo and Tomotaka Takahashi, to accompany Koichi Wakata, the first Japanese commander of the International Space Station. Kirobo arrived on the ISS on August 10, 2013 on JAXA's H-II Transfer Vehicle Kounotori 4, an unmanned resupply spacecraft launched August 4, 2013 from Japan's Tanegashima Space Center. A twin to Kirobo, named Mirata, was created with the same characteristics, and stayed on Earth as a backup crew member. The word "kirobo" itself is a portmanteau of "kibō" (希望), which means "hope" in Japanese, and the word "robo" (ロボ), used as a generic short word for any robot.

High Definition Earth Viewing (HDEV) cameras were a payload package delivered to the International Space Station on the SpaceX CRS-3 Mission, launched on April 18, 2014. The High-Definition Earth Viewing camera suite was carried aboard the Dragon spacecraft and is configured on a platform on the exterior of the European Space Agency's Columbus laboratory module. It was the first large unpressurized NASA experiment to be assigned for delivery to the International Space Station by SpaceX. The system is composed of four commercial high definition video cameras which were built to record video of the Earth from multiple angles by having them mounted on the International Space Station. The cameras streamed live video of Earth to be viewed online and on NASA TV on the show Earth Views. Previously-recorded video now plays in a continuous loop on public streaming sites.

The Nanoracks CubeSat Deployer (NRCSD) is a device to deploy CubeSats into orbit from the International Space Station (ISS).

The Int-Ball, also known as the JEM Internal Ball Camera, is an experimental, autonomous, self-propelled, and maneuverable ball camera that is deployed in the Japanese Kibō module of the International Space Station. It was delivered aboard SpaceX CRS-11 on June 4, 2017. The Int-Ball is intended to perform some of the photo-video documentation workload aboard the ISS. The Int-Ball was designed by the Japan Aerospace Exploration Agency and is controlled and monitored by a team of JAXA ground controllers.
DESTINY+ (Demonstration and Experiment of Space Technology for INterplanetary voYage with Phaethon fLyby and dUst Science) is a planned mission to flyby the Geminids meteor shower parent body 3200 Phaethon, as well as various minor bodies originating from the "rock comet". The spacecraft is being developed by the Japanese space agency JAXA, and will demonstrate advanced technologies for future deep space exploration. As of 2020, DESTINY+ is planned to be launched in 2024.

The Martian Moons eXploration (MMX) is a robotic space probe set for launch in 2024 to bring back the first samples from Mars' largest moon Phobos. Developed by the Japanese Aerospace Exploration Agency (JAXA) and announced on 9 June 2015, MMX will land and collect samples from Phobos once or twice, along with conducting Deimos flyby observations and monitoring Mars's climate.

