Related Research Articles

A gyroscope is a device used for measuring or maintaining orientation and angular velocity. It is a spinning wheel or disc in which the axis of rotation is free to assume any orientation by itself. When rotating, the orientation of this axis is unaffected by tilting or rotation of the mounting, according to the conservation of angular momentum.

Steadicam is a brand of camera stabilizer mounts for motion picture cameras invented by Garrett Brown and introduced in 1975 by Cinema Products Corporation. The Steadicam brand was acquired by Tiffen in 2000. It was designed to isolate the camera from the camera operator's movement, keeping the camera motion separate and controllable by a skilled operator.

A ring laser gyroscope (RLG) consists of a ring laser having two independent counter-propagating resonant modes over the same path; the difference in phase is used to detect rotation. It operates on the principle of the Sagnac effect which shifts the nulls of the internal standing wave pattern in response to angular rotation. Interference between the counter-propagating beams, observed externally, results in motion of the standing wave pattern, and thus indicates rotation.
A gimbal is a pivoted support that permits rotation of an object about an axis. A set of three gimbals, one mounted on the other with orthogonal pivot axes, may be used to allow an object mounted on the innermost gimbal to remain independent of the rotation of its support. For example, on a ship, the gyroscopes, shipboard compasses, stoves, and even drink holders typically use gimbals to keep them upright with respect to the horizon despite the ship's pitching and rolling.
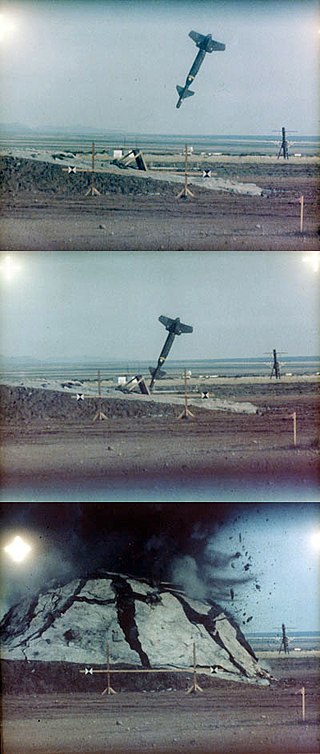
Missile guidance refers to a variety of methods of guiding a missile or a guided bomb to its intended target. The missile's target accuracy is a critical factor for its effectiveness. Guidance systems improve missile accuracy by improving its Probability of Guidance (Pg).
A vibrating structure gyroscope (VSG), defined by the IEEE as a Coriolis vibratory gyroscope (CVG), is a gyroscope that uses a vibrating structure to determine the rate of rotation. A vibrating structure gyroscope functions much like the halteres of flies.
Schuler tuning is a design principle for inertial navigation systems that accounts for the curvature of the Earth. An inertial navigation system, used in submarines, ships, aircraft, and other vehicles to keep track of position, determines directions with respect to three axes pointing "north", "east", and "down". To detect the vehicle's orientation, the system contains an "inertial platform" mounted on gimbals, with gyroscopes that detect motion connected to a servo system to keep it pointing in a fixed orientation in space. However, the directions "north", "east" and "down" change as the vehicle moves on the curved surface of the Earth. Schuler tuning describes the conditions necessary for an inertial navigation system to keep the inertial platform always pointing "north", "east" and "down", so it gives correct directions on the near-spherical Earth. It is widely used in electronic control systems.

The Sagnac effect, also called Sagnac interference, named after French physicist Georges Sagnac, is a phenomenon encountered in interferometry that is elicited by rotation. The Sagnac effect manifests itself in a setup called a ring interferometer or Sagnac interferometer. A beam of light is split and the two beams are made to follow the same path but in opposite directions. On return to the point of entry the two light beams are allowed to exit the ring and undergo interference. The relative phases of the two exiting beams, and thus the position of the interference fringes, are shifted according to the angular velocity of the apparatus. In other words, when the interferometer is at rest with respect to a nonrotating frame, the light takes the same amount of time to traverse the ring in either direction. However, when the interferometer system is spun, one beam of light has a longer path to travel than the other in order to complete one circuit of the mechanical frame, and so takes longer, resulting in a phase difference between the two beams. Georges Sagnac set up this experiment in 1913 in an attempt to prove the existence of the aether that Einstein's theory of special relativity makes superfluous.

A fibre-optic gyroscope (FOG) senses changes in orientation using the Sagnac effect, thus performing the function of a mechanical gyroscope. However its principle of operation is instead based on the interference of light which has passed through a coil of optical fibre, which can be as long as 5 kilometres (3 mi).

Ship stabilizers are fins or rotors mounted beneath the waterline and emerging laterally from the hull to reduce a ship's roll due to wind or waves. Active fins are controlled by a gyroscopic control system. When the gyroscope senses the ship roll, it changes the fins' angle of attack so that the forward motion of the ship exerts force to counteract the roll. Fixed fins and bilge keels do not move; they reduce roll by hydrodynamic drag exerted when the ship rolls. Stabilizers are mostly used on ocean-going ships.
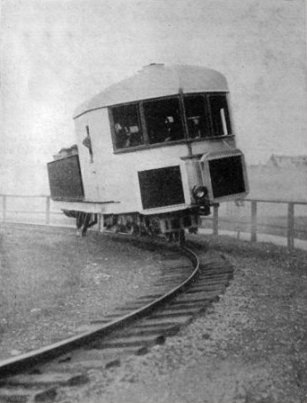
The gyro monorail, gyroscopic monorail, gyro-stabilized monorail, or gyrocar are terms for a single rail land vehicle that uses the gyroscopic action of a spinning wheel to overcome the inherent instability of balancing on top of a single rail.
A Rate integrating gyroscope is a rate gyro with a built in integrator. It is usually a component of an Inertial Measurement Unit or a stabilization system.

The Advanced Inertial Reference Sphere (AIRS) is a highly accurate inertial navigation system designed for use in the LGM-118A Peacekeeper ICBM, which was intended for precision nuclear strikes against Soviet missile silos.
The Delco Carousel — proper name Carousel IV — was an inertial navigation system (INS) for aircraft developed by Delco Electronics. Before the advent of sophisticated flight management systems, Carousel IV allowed pilots to automate navigation of an aircraft along a series of waypoints that they entered via a control console in the cockpit.
A PIGA is a type of accelerometer that can measure acceleration and simultaneously integrates this acceleration against time to produce a speed measure as well. The PIGA's main use is in Inertial Navigation Systems (INS) for guidance of aircraft and most particularly for ballistic missile guidance. It is valued for its extremely high sensitivity and accuracy in conjunction with operation over a wide acceleration range. The PIGA is still considered the premier instrument for strategic grade missile guidance, though systems based on MEMS technology are attractive for lower performance requirements.
The Tamam Division of the Systems Missiles and Space Group of the Israel Aerospace Industries (IAI) is a manufacturing plant in the development and production of high performance Inertial and Electro-Optic (EO) products and systems and maritime drones.

An inertial navigation system is a navigation device that uses motion sensors (accelerometers), rotation sensors (gyroscopes) and a computer to continuously calculate by dead reckoning the position, the orientation, and the velocity of a moving object without the need for external references. Often the inertial sensors are supplemented by a barometric altimeter and sometimes by magnetic sensors (magnetometers) and/or speed measuring devices. INSs are used on mobile robots and on vehicles such as ships, aircraft, submarines, guided missiles, and spacecraft. Older INS systems generally used an inertial platform as their mounting point to the vehicle and the terms are sometimes considered synonymous.

The LN-3 inertial navigation system is an inertial navigation system (INS) that was developed in the 1960s by Litton Industries. It equipped the Lockheed F-104 Starfighter versions used as strike aircraft in European forces. An inertial navigation system is a system which continually determines the position of a vehicle from measurements made entirely within the vehicle using sensitive instruments. These instruments are accelerometers which detect and measure vehicle accelerations, and gyroscopes which act to hold the accelerometers in proper orientation.
Spacecraft attitude control is the process of controlling the orientation of a spacecraft with respect to an inertial frame of reference or another entity such as the celestial sphere, certain fields, and nearby objects, etc.

An inertial measurement unit (IMU) is an electronic device that measures and reports a body's specific force, angular rate, and sometimes the orientation of the body, using a combination of accelerometers, gyroscopes, and sometimes magnetometers. When the magnetometer is included, IMUs are referred to as IMMUs.
References
| | This technology-related article is a stub. You can help Wikipedia by expanding it. |
| | This tool article is a stub. You can help Wikipedia by expanding it. |