
A wargame is a strategy game in which two or more players command opposing armed forces in a simulation of an armed conflict. Wargaming may be played for recreation, to train military officers in the art of strategic thinking, or to study the nature of potential conflicts. Many wargames re-create specific historic battles, and can cover either whole wars, or any campaigns, battles, or lower-level engagements within them. Many simulate land combat, but there are wargames for naval, air combat, and cyber as well as many that combine various domains.
Distributed artificial intelligence (DAI) also called Decentralized Artificial Intelligence is a subfield of artificial intelligence research dedicated to the development of distributed solutions for problems. DAI is closely related to and a predecessor of the field of multi-agent systems.

A multi-agent system is a computerized system composed of multiple interacting intelligent agents. Multi-agent systems can solve problems that are difficult or impossible for an individual agent or a monolithic system to solve. Intelligence may include methodic, functional, procedural approaches, algorithmic search or reinforcement learning.

Meta-process modeling is a type of metamodeling used in software engineering and systems engineering for the analysis and construction of models applicable and useful to some predefined problems.
The belief–desire–intention software model (BDI) is a software model developed for programming intelligent agents. Superficially characterized by the implementation of an agent's beliefs, desires and intentions, it actually uses these concepts to solve a particular problem in agent programming. In essence, it provides a mechanism for separating the activity of selecting a plan from the execution of currently active plans. Consequently, BDI agents are able to balance the time spent on deliberating about plans and executing those plans. A third activity, creating the plans in the first place (planning), is not within the scope of the model, and is left to the system designer and programmer.
A problem solving environment (PSE) is a completed, integrated and specialised computer software for solving one class of problems, combining automated problem-solving methods with human-oriented tools for guiding the problem resolution. A PSE may also assist users in formulating problem resolution. A PSE may also assist users in formulating problems, selecting algorithm, simulating numerical value and viewing and analysing results.
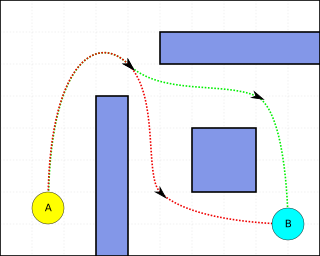
Pathfinding or pathing is the search, by a computer application, for the shortest route between two points. It is a more practical variant on solving mazes. This field of research is based heavily on Dijkstra's algorithm for finding the shortest path on a weighted graph.
In intelligence and artificial intelligence, an intelligent agent (IA) is an agent acting in an intelligent manner. It perceives its environment, takes actions autonomously in order to achieve goals, and may improve its performance with learning or acquiring knowledge. An intelligent agent may be simple or complex: A thermostat or other control system is considered an example of an intelligent agent, as is a human being, as is any system that meets the definition, such as a firm, a state, or a biome.

Mesh generation is the practice of creating a mesh, a subdivision of a continuous geometric space into discrete geometric and topological cells. Often these cells form a simplicial complex. Usually the cells partition the geometric input domain. Mesh cells are used as discrete local approximations of the larger domain. Meshes are created by computer algorithms, often with human guidance through a GUI, depending on the complexity of the domain and the type of mesh desired. A typical goal is to create a mesh that accurately captures the input domain geometry, with high-quality (well-shaped) cells, and without so many cells as to make subsequent calculations intractable. The mesh should also be fine in areas that are important for the subsequent calculations.
Multi-objective optimization or Pareto optimization is an area of multiple-criteria decision making that is concerned with mathematical optimization problems involving more than one objective function to be optimized simultaneously. Multi-objective is a type of vector optimization that has been applied in many fields of science, including engineering, economics and logistics where optimal decisions need to be taken in the presence of trade-offs between two or more conflicting objectives. Minimizing cost while maximizing comfort while buying a car, and maximizing performance whilst minimizing fuel consumption and emission of pollutants of a vehicle are examples of multi-objective optimization problems involving two and three objectives, respectively. In practical problems, there can be more than three objectives.
Agent-Oriented Software Engineering (AOSE) is a new software engineering paradigm that arose to apply best practice in the development of complex Multi-Agent Systems (MAS) by focusing on the use of agents, and organizations (communities) of agents as the main abstractions. The field of Software Product Lines (SPL) covers all the software development lifecycle necessary to develop a family of products where the derivation of concrete products is made systematically and rapidly.
Lateral computing is a lateral thinking approach to solving computing problems. Lateral thinking has been made popular by Edward de Bono. This thinking technique is applied to generate creative ideas and solve problems. Similarly, by applying lateral-computing techniques to a problem, it can become much easier to arrive at a computationally inexpensive, easy to implement, efficient, innovative or unconventional solution.
GOAL is an agent programming language for programming cognitive agents. GOAL agents derive their choice of action from their beliefs and goals. The language provides the basic building blocks to design and implement cognitive agents by programming constructs that allow and facilitate the manipulation of an agent's beliefs and goals and to structure its decision-making. The language provides an intuitive programming framework based on common sense or practical reasoning.
AgentSpeak is an agent-oriented programming language. It is based on logic programming and the belief–desire–intention software model (BDI) architecture for (cognitive) autonomous agents. The language was originally called AgentSpeak(L), but became more popular as AgentSpeak, a term that is also used to refer to the variants of the original language.
JACK Intelligent Agents is a framework in Java for multi-agent system development. JACK Intelligent Agents was built by Agent Oriented Software Pty. Ltd. (AOS) and is a third generation agent platform building on the experiences of the Procedural Reasoning System (PRS) and Distributed Multi-Agent Reasoning System (dMARS). JACK is one of the few multi-agent systems that uses the BDI software model and provides its own Java-based plan language and graphical planning tools.
2APL is a modular BDI-based programming language that supports the development of multi-agent systems. 2APL provides a rich set of programming constructs allowing direct implementation of concepts such as beliefs, declarative goals, actions, plans, events, and reasoning rules. The reasoning rules allow run-time selection and generation of plans based on declarative goals, received events and messages, and failed plans. 2APL can be used to implement multi-agent systems consisting of software agents with reactive as well as pro-active behaviours.
Open energy system models are energy system models that are open source. However, some of them may use third party proprietary software as part of their workflows to input, process, or output data. Preferably, these models use open data, which facilitates open science.
The SARL programming language is a modular agent-oriented programming language. It aims at providing the fundamental abstractions for dealing with concurrency, distribution, interaction, decentralization, reactivity, autonomy and dynamic reconfiguration.

Leendert (Leon) van der Torre is a professor of computer science at the University of Luxembourg and head of the Individual and Collective Reasoning (ICR) group, part of the Computer Science and Communication (CSC) Research Unit. Leon van der Torre is a prolific researcher in deontic logic and multi-agent systems, a member of the Ethics Advisory Committee of the University of Luxembourg and founder of the CSC Robotic research laboratory. Since March 2016 he is the head of the Computer Science and Communication (CSC) Research Unit.

The problem of Multi-Agent Pathfinding (MAPF) is an instance of multi-agent planning and consists in the computation of collision-free paths for a group of agents from their location to an assigned target. It is an optimization problem, since the aim is to find those paths that optimize a given objective function, usually defined as the number of time steps until all agents reach their goal cells. MAPF is the multi-agent generalization of the pathfinding problem, and it is closely related to the shortest path problem in the context of graph theory.