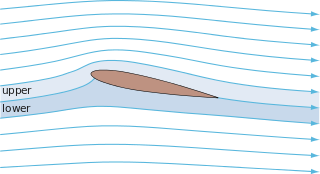
In fluid dynamics, potential flow describes the velocity field as the gradient of a scalar function: the velocity potential. As a result, a potential flow is characterized by an irrotational velocity field, which is a valid approximation for several applications. The irrotationality of a potential flow is due to the curl of the gradient of a scalar always being equal to zero.
In linear algebra, two vectors in an inner product space are orthonormal if they are orthogonal and unit vectors. A set of vectors form an orthonormal set if all vectors in the set are mutually orthogonal and all of unit length. An orthonormal set which forms a basis is called an orthonormal basis.
In physics, an operator is a function over a space of physical states to another space of physical states. The simplest example of the utility of operators is the study of symmetry. Because of this, they are very useful tool in classical mechanics. Operators are even more important in quantum mechanics, where they form an intrinsic part of the formulation of the theory.
In differential geometry, the Lie derivative, named after Sophus Lie by Władysław Ślebodziński, evaluates the change of a tensor field, along the flow defined by another vector field. This change is coordinate invariant and therefore the Lie derivative is defined on any differentiable manifold.
In mathematics, a Green's function is the impulse response of an inhomogeneous linear differential equation defined on a domain, with specified initial conditions or boundary conditions.
In mathematics, the covariant derivative is a way of specifying a derivative along tangent vectors of a manifold. Alternatively, the covariant derivative is a way of introducing and working with a connection on a manifold by means of a differential operator, to be contrasted with the approach given by a principal connection on the frame bundle – see affine connection. In the special case of a manifold isometrically embedded into a higher-dimensional Euclidean space, the covariant derivative can be viewed as the orthogonal projection of the Euclidean derivative along a tangent vector onto the manifold's tangent space. In this case the Euclidean derivative is broken into two parts, the extrinsic normal component and the intrinsic covariant derivative component.
In mathematics, Green's identities are a set of three identities in vector calculus relating the bulk with the boundary of a region on which differential operators act. They are named after the mathematician George Green, who discovered Green's theorem.

In linear algebra, a basis for a vector space of dimension n is a set of n vectors (α1, …, αn), called basis vectors, with the property that every vector in the space can be expressed as a unique linear combination of the basis vectors. The matrix representations of operators are also determined by the chosen basis. Since it is often desirable to work with more than one basis for a vector space, it is of fundamental importance in linear algebra to be able to easily transform coordinate-wise representations of vectors and operators taken with respect to one basis to their equivalent representations with respect to another basis. Such a transformation is called a change of basis.
In mathematics, the jet is an operation that takes a differentiable function f and produces a polynomial, the truncated Taylor polynomial of f, at each point of its domain. Although this is the definition of a jet, the theory of jets regards these polynomials as being abstract polynomials rather than polynomial functions.
In theoretical physics, Nordström's theory of gravitation was a predecessor of general relativity. Strictly speaking, there were actually two distinct theories proposed by the Finnish theoretical physicist Gunnar Nordström, in 1912 and 1913 respectively. The first was quickly dismissed, but the second became the first known example of a metric theory of gravitation, in which the effects of gravitation are treated entirely in terms of the geometry of a curved spacetime.
The gauge covariant derivative is a variation of the covariant derivative used in general relativity. If a theory has gauge transformations, it means that some physical properties of certain equations are preserved under those transformations. Likewise, the gauge covariant derivative is the ordinary derivative modified in such a way as to make it behave like a true vector operator, so that equations written using the covariant derivative preserve their physical properties under gauge transformations.
The following identities are important in vector calculus:
The M. Riesz extension theorem is a theorem in mathematics, proved by Marcel Riesz during his study of the problem of moments.
In the mathematical field of differential topology, the Lie bracket of vector fields, also known as the Jacobi–Lie bracket or the commutator of vector fields, is an operator that assigns to any two vector fields X and Y on a smooth manifold M a third vector field denoted [X, Y].

The Kelvin–Stokes theorem, named after Lord Kelvin and George Stokes, also known as the Stokes' theorem, the fundamental theorem for curls or simply the curl theorem, is a theorem in vector calculus on . Given a vector field, the theorem relates the integral of the curl of the vector field over some surface, to the line integral of the vector field around the boundary of the surface.
A Representation up to homotopy is a concept in differential geometry that generalizes the notion of representation of a Lie algebra to Lie algebroids and nontrivial vector bundles. It was introduced by Abad and Crainic.
In mathematics, the Neumann–Poincaré operator or Poincaré–Neumann operator, named after Carl Neumann and Henri Poincaré, is a non-self-adjoint compact operator introduced by Poincaré to solve boundary value problems for the Laplacian on bounded domains in Euclidean space. Within the language of potential theory it reduces the partial differential equation to an integral equation on the boundary to which the theory of Fredholm operators can be applied. The theory is particularly simple in two dimensions—the case treated in detail in this article—where it is related to complex function theory, the conjugate Beurling transform or complex Hilbert transform and the Fredholm eigenvalues of bounded planar domains.
In physics and geometry, there are two closely related vector spaces, usually three-dimensional but in general could be any finite number of dimensions.
In mathematics, the ring of polynomial functions on a vector space V over a field k gives a coordinate-free analog of a polynomial ring. It is denoted by k[V]. If V has finite dimension and is viewed as an algebraic variety, then k[V] is precisely the coordinate ring of V.
Lagrangian field theory is a formalism in classical field theory. It is the field-theoretic analogue of Lagrangian mechanics. Lagrangian mechanics is used for discrete particles each with a finite number of degrees of freedom. Lagrangian field theory applies to continua and fields, which have an infinite number of degrees of freedom.























