
Analog television is the original television technology that uses analog signals to transmit video and audio. In an analog television broadcast, the brightness, colors and sound are represented by amplitude, phase and frequency of an analog signal.

A galvanometer is an electromechanical measuring instrument for electric current. Early galvanometers were uncalibrated, but improved versions, called ammeters, were calibrated and could measure the flow of current more precisely.
Starwisp is a hypothetical unmanned interstellar probe design proposed by the late Robert L. Forward. It is propelled by a microwave sail, similar to a solar sail in concept, but powered by microwaves from a human-made source. It would fly through the target system without slowing down.
BEAM robotics is a style of robotics that primarily uses simple analogue circuits, such as comparators, instead of a microprocessor in order to produce an unusually simple design. While not as flexible as microprocessor based robotics, BEAM robotics can be robust and efficient in performing the task for which it was designed.
The term wired intelligence refers to a robot that has no programmed microprocessor. Instead, the robot has a particular connection of wires and analog electronics between its sensors and motors that gives it seemingly intelligent actions. These actions can be complex enough to create a quadruped robot that seeks out the brightest light source.
Behavior-based robotics (BBR) or behavioral robotics is an approach in robotics that focuses on robots that are able to exhibit complex-appearing behaviors despite little internal variable state to model its immediate environment, mostly gradually correcting its actions via sensory-motor links.

Storage tubes are a class of cathode-ray tubes (CRTs) that are designed to hold an image for a long period of time, typically as long as power is supplied to the tube.
Direct-view bistable storage tube (DVBST) was an acronym used by Tektronix to describe their line of storage tubes. These were cathode ray tubes (CRT) that stored information written to them using an analog technique inherent in the CRT and based upon the secondary emission of electrons from the phosphor screen itself. The resulting image was visible in the continuously glowing patterns on the face of the CRT.

576i is a standard-definition digital video mode, originally used for digitizing analog television in most countries of the world where the utility frequency for electric power distribution is 50 Hz. Because of its close association with the legacy colour encoding systems, it is often referred to as PAL, PAL/SECAM or SECAM when compared to its 60 Hz NTSC-colour-encoded counterpart, 480i.
A general-purpose input/output (GPIO) is an uncommitted digital signal pin on an integrated circuit or electronic circuit board which may be used as an input or output, or both, and is controllable by software.

Valentino Braitenberg was an Italian neuroscientist and cyberneticist. He was former director at the Max Planck Institute for Biological Cybernetics in Tübingen, Germany.
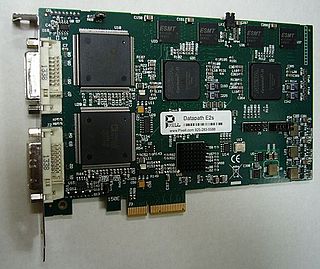
A frame grabber is an electronic device that captures individual, digital still frames from an analog video signal or a digital video stream. It is usually employed as a component of a computer vision system, in which video frames are captured in digital form and then displayed, stored, transmitted, analyzed, or combinations of these.
An electronic circuit is composed of individual electronic components, such as resistors, transistors, capacitors, inductors and diodes, connected by conductive wires or traces through which electric current can flow. It is a type of electrical circuit and to be referred to as electronic, rather than electrical, generally at least one active component must be present. The combination of components and wires allows various simple and complex operations to be performed: signals can be amplified, computations can be performed, and data can be moved from one place to another.

A photoelectric sensor is a device used to determine the distance, absence, or presence of an object by using a light transmitter, often infrared, and a photoelectric receiver. They are largely used in industrial manufacturing. There are three different useful types: opposed (through-beam), retro-reflective, and proximity-sensing (diffused).

An oscilloscope is a type of electronic test instrument that graphically displays varying voltages of one or more signals as a function of time. The main purpose is capture information on electrical signals for debugging, analysis, or characterization. The displayed waveform can then be analyzed for properties such as amplitude, frequency, rise time, time interval, distortion, and others. Originally, calculation of these values required manually measuring the waveform against the scales built into the screen of the instrument. Modern digital instruments may calculate and display these properties directly.

A Braitenberg vehicle is a concept conceived in a thought experiment by the Italian-Austrian cyberneticist Valentino Braitenberg. The book models the animal world in a minimalistic and constructive way, from simple reactive behaviours through the simplest vehicles, to the formation of concepts, spatial behaviour, and generation of ideas.
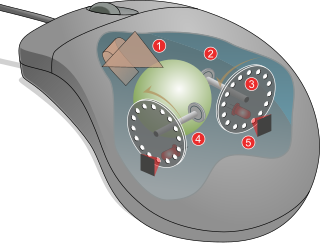
The slotted optical switch, sometimes known as opto switch or optical switch but not to be confused with the optical component, is a device comprising a photoemitter and a photodetector mounted in a single package so that the photoemitter normally illuminates the photodetector, but an opaque object can be inserted in a slot between them so as to break the beam. Associated circuitry is provided which changes state when the beam is interrupted. For example, the carriage of a computer printer may be fitted with a projection which interrupts the beam of a slotted switch when it reaches the end of its travel, causing circuitry to react appropriately. Another application of the slotted switch is in the type of computer mouse with a rotating ball. The ball measures distances moved by rotating orthogonal shafts which drive optical chopper wheels turning in the slots of slotted switches.
This is a subdivision of the Oscilloscope article, discussing the various types and models of oscilloscopes in greater detail.
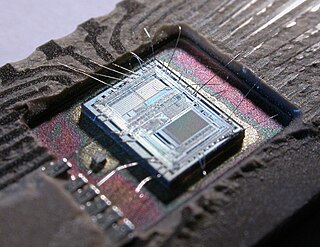
A vision chip is an integrated circuit having both image sensing circuitry and image processing circuitry on the same die. The image sensing circuitry may be implemented using charge-coupled devices, active pixel sensor circuits, or any other light sensing mechanism. The image processing circuitry may be implemented using analog, digital, or mixed signal circuitry. One area of research is the use of neuromorphic engineering techniques to implement processing circuits inspired by biological neural systems. The output of a vision chip is generally a partially processed image or a high-level information signal revealing something about the observed scene. Although there is no standard definition of a vision chip, the processing performed may comprise anything from processing individual pixel values to performing complex image processing functions and outputting a single value or yes/no signal based on the scene.
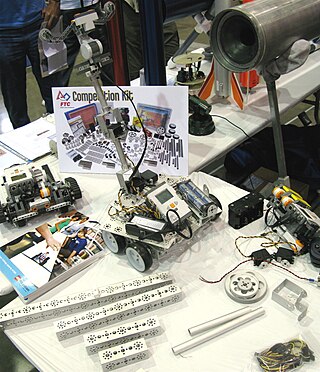
TETRIX Robotics consists of two robotic kits by Pitsco Education. The two sets are the TETRIX® MAX building system and the TETRIX® PRIME building system. They are intended to be used as educational robotics and for competitions such as the FIRST Tech Challenge.