Related Research Articles

A conventional fixed-wing aircraft flight control system consists of flight control surfaces, the respective cockpit controls, connecting linkages, and the necessary operating mechanisms to control an aircraft's direction in flight. Aircraft engine controls are also considered as flight controls as they change speed.

The Robinson R22 is a two-seat, two-bladed, single-engine light utility helicopter manufactured by Robinson Helicopter Company. It was designed in 1973 by Frank D. Robinson, and has been in production since 1979.

The Mil V-12, given the project number Izdeliye 65, is the largest helicopter ever built. The designation "Mi-12" would have been the name for the production helicopter and was not applied to the V-12 prototypes.

The vortex ring state (VRS) is a dangerous aerodynamic condition that may arise in helicopter flight, when a vortex ring system engulfs the rotor, causing severe loss of lift. The vortex ring state is sometimes referred to as settling with power. The Federal Aviation Administration (FAA) sees these terms as synonymous, whereas Transport Canada sees them as two different phenomena.

A radio-controlled helicopter is model aircraft which is distinct from a RC airplane because of the differences in construction, aerodynamics, and flight training. Several basic designs of RC helicopters exist, of which some are more maneuverable than others. The more maneuverable designs are often harder to fly, but benefit from greater aerobatic capabilities.
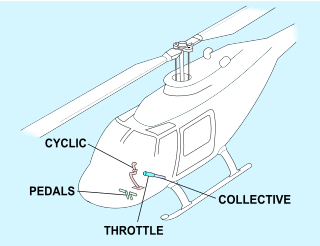
A helicopter pilot manipulates the helicopter flight controls to achieve and maintain controlled aerodynamic flight. Changes to the aircraft flight control system transmit mechanically to the rotor, producing aerodynamic effects on the rotor blades that make the helicopter move in a deliberate way. To tilt forward and back (pitch) or sideways (roll) requires that the controls alter the angle of attack of the main rotor blades cyclically during rotation, creating differing amounts of lift (force) at different points in the cycle. To increase or decrease overall lift requires that the controls alter the angle of attack for all blades collectively by equal amounts at the same time, resulting in ascent, descent, acceleration and deceleration.

The tail rotor is a smaller rotor mounted vertically or near-vertically at the tail of a traditional single-rotor helicopter, where it rotates to generate a propeller-like horizontal thrust in the same direction as the main rotor's rotation. The tail rotor's position and distance from the helicopter's center of mass allow it to develop enough thrust leverage to counter the reactional torque exerted on the fuselage by the spinning of the main rotor. Without the tail rotor or other anti-torque mechanisms, the helicopter would be constantly spinning in the opposite direction of the main rotor when flying.
Blade pitch or simply pitch refers to the angle of a blade in a fluid. The term has applications in aeronautics, shipping, and other fields.

Coaxial rotors or coax rotors are a pair of helicopter rotors mounted one above the other on concentric shafts, with the same axis of rotation, but turning in opposite directions (contra-rotating). This rotor configuration is a feature of helicopters produced by the Russian Kamov helicopter design bureau.

A helicopter main rotor or rotor system is the combination of several rotary wings and a control system that generates the aerodynamic lift force that supports the weight of the helicopter, and the thrust that counteracts aerodynamic drag in forward flight. Each main rotor is mounted on a vertical mast over the top of the helicopter, as opposed to a helicopter tail rotor, which connects through a combination of drive shaft(s) and gearboxes along the tail boom. The blade pitch is typically controlled by a swashplate connected to the helicopter flight controls. Helicopters are one example of rotary-wing aircraft (rotorcraft). The name is derived from the Greek words helix, helik-, meaning spiral; and pteron meaning wing.
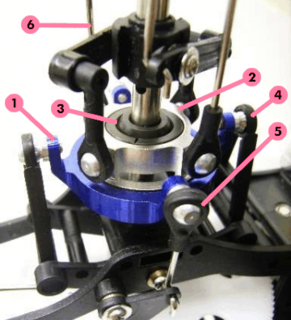
A swashplate is a device that translates input via the helicopter flight controls into motion of the main rotor blades. Because the main rotor blades are spinning, the swashplate is used to transmit three of the pilot's commands from the non-rotating fuselage to the rotating rotor hub and mainblades.

A quadcopter or quadrotor is a type of helicopter with four rotors.
A swashplate, also known as slant disk, was invented by Anthony Michell in 1917. It is a mechanical engineering device used to translate the motion of a rotating shaft into reciprocating motion, or vice versa. The working principles is similar to crankshaft, Scotch yoke, or wobble/nutator/Z-crank drives, in engine designs. It was originally invented to replace a crankshaft, and is one of the most popular concepts used in crankless engines.

The Fairey Jet Gyrodyne is a British experimental gyrodyne built by the Fairey Aviation Company that incorporated helicopter, gyrodyne and autogyro characteristics. The Jet Gyrodyne was the subject of a Ministry of Supply (MoS) research contract to gather data for the follow-up design, the Rotodyne.
In the aerodynamics of rotorcraft like helicopters, phase lag refers to the angular difference between the point at which a control input to a rotor blade occurs and the point of maximum displacement of the blade in response to that control input. This displacement occurs in the direction of rotor rotation. Phase lag differs from advance angle in the latter referring to the mechanically fixed angle between the pitch link attachments at the blade and the swashplate. Phase lag may vary depending on rotor tilt rate, ratio of aerodynamic damping to blade inertial forces, offset of flapping hinge from axis of rotation, and coupling of blade flap, drag, and feather motions, and often results in cross-coupling between the aircraft control axes; advance angle is fixed and cannot vary. Phase lag is a property of all rotating systems acted upon by a periodic force.

The Picoo Z(also sold under the brand name of Air Hogs Havoc Heli in North America) is a miniature remote-controlled 2-channel helicopter manufactured by Hong Kong-based Silverlit Toys. In the United States it is distributed by Spin Master.

A helicopter is a type of rotorcraft in which lift and thrust are supplied by horizontally spinning rotors. This allows the helicopter to take off and land vertically, to hover, and to fly forward, backward and laterally. These attributes allow helicopters to be used in congested or isolated areas where fixed-wing aircraft and many forms of STOL or STOVL aircraft cannot perform without runway.
Proxflyer refers to a family of micro R/C helicopter prototypes based on a dual coaxial counter-rotating rotor concept developed and patented by Norwegian Petter Muren. The concept differs from the swashplate designs in conventional helicopter flight controls and enables a helicopter to be passively stable in hover. Elimination of the conventional cyclic and collective pitch controls allows for simpler and lighter helicopters to be developed. A helicopter based on this design achieves stability without the use of gyroscopes or any form of active stabilization and thus is made up of much fewer parts than other model helicopters. The two counter-rotating rotors keep the helicopter very stable relative to the surrounding air. Altitude control is performed by varying the speed for both main rotors while Yaw control is achieved by increasing the speed of one rotor and reducing the speed of the other rotor by the same amount. A horizontally oriented tail rotor controls the helicopter’s forward or backward movement by shifting its center of lift with respect to the center of gravity (CG).

The Cierva W.9 was a British 1940s experimental helicopter with a three-blade tilting-hub controlled main rotor, and torque compensation achieved using a jet of air discharged from the rear port side of the fuselage.

Servos are small, cheap, mass-produced servomotors or other actuators used for radio control and small-scale robotics.
References
- ↑ "What is CCPM and why it's so important" . Retrieved 28 October 2014.
- 1 2 "What is the deal with mCCPM and eCCPM?". Archived from the original on 5 March 2016. Retrieved 23 October 2019.
- ↑ "Understanding Flybarless RC Helicopters & FBL Systems/Controllers". RCHelicopterFun.com. Retrieved 2022-03-17.
- ↑ "Best Flybarless System - Is There Such A Thing?". RCHelicopterFun.com. Retrieved 2022-03-17.