
A gyroscope is a device used for measuring or maintaining orientation and angular velocity. It is a spinning wheel or disc in which the axis of rotation is free to assume any orientation by itself. When rotating, the orientation of this axis is unaffected by tilting or rotation of the mounting, according to the conservation of angular momentum.

A ring laser gyroscope (RLG) consists of a ring laser having two independent counter-propagating resonant modes over the same path; the difference in phase is used to detect rotation. It operates on the principle of the Sagnac effect which shifts the nulls of the internal standing wave pattern in response to angular rotation. Interference between the counter-propagating beams, observed externally, results in motion of the standing wave pattern, and thus indicates rotation.

The attitude indicator (AI), formerly known as the gyro horizon or artificial horizon, is a flight instrument that informs the pilot of the aircraft orientation relative to Earth's horizon, and gives an immediate indication of the smallest orientation change. The miniature aircraft and horizon bar mimic the relationship of the aircraft relative to the actual horizon. It is a primary instrument for flight in instrument meteorological conditions.
A guidance system is a virtual or physical device, or a group of devices implementing a controlling the movement of a ship, aircraft, missile, rocket, satellite, or any other moving object. Guidance is the process of calculating the changes in position, velocity, altitude, and/or rotation rates of a moving object required to follow a certain trajectory and/or altitude profile based on information about the object's state of motion.

An accelerometer is a device that measures the proper acceleration of an object. Proper acceleration is the acceleration of the object relative to an observer who is in free fall. Proper acceleration is different from coordinate acceleration, which is acceleration with respect to a given coordinate system, which may or may not be accelerating. For example, an accelerometer at rest on the surface of the Earth will measure an acceleration due to Earth's gravity straight upwards of about g ≈ 9.81 m/s2. By contrast, an accelerometer that is in free fall will measure zero acceleration.
Missile guidance refers to a variety of methods of guiding a missile or a guided bomb to its intended target. The missile's target accuracy is a critical factor for its effectiveness. Guidance systems improve missile accuracy by improving its Probability of Guidance (Pg).
Draper Laboratory is an American non-profit research and development organization, headquartered in Cambridge, Massachusetts; its official name is The Charles Stark Draper Laboratory, Inc. The laboratory specializes in the design, development, and deployment of advanced technology solutions to problems in national security, space exploration, health care and energy.

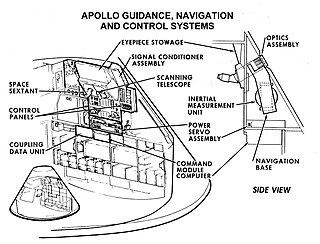
Charles Stark "Doc" Draper was an American scientist and engineer, known as the "father of inertial navigation". He was the founder and director of the Massachusetts Institute of Technology's Instrumentation Laboratory, later renamed the Charles Stark Draper Laboratory, which made the Apollo Moon landings possible through the Apollo Guidance Computer it designed for NASA.

The Saturn V instrument unit is a ring-shaped structure fitted to the top of the Saturn V rocket's third stage (S-IVB) and the Saturn IB's second stage. It was immediately below the SLA (Spacecraft/Lunar Module Adapter) panels that contained the Apollo Lunar Module. The instrument unit contains the guidance system for the Saturn V rocket. Some of the electronics contained within the instrument unit are a digital computer, analog flight control computer, emergency detection system, inertial guidance platform, control accelerometers, and control rate gyros. The instrument unit (IU) for Saturn V was designed by NASA at Marshall Space Flight Center (MSFC) and was developed from the Saturn I IU. NASA's contractor to manufacture the Saturn V Instrument Unit was International Business Machines (IBM).

An inclinometer or clinometer is an instrument used for measuring angles of slope, elevation, or depression of an object with respect to gravity's direction. It is also known as a tilt indicator, tilt sensor, tilt meter, slope alert, slope gauge, gradient meter, gradiometer, level gauge, level meter, declinometer, and pitch & roll indicator. Clinometers measure both inclines and declines using three different units of measure: degrees, percentage points, and topos. The astrolabe is an example of an inclinometer that was used for celestial navigation and location of astronomical objects from ancient times to the Renaissance.

Dr. Fritz K. Mueller was a German engineer.
A Rate integrating gyroscope is a rate gyro with a built in integrator. It is usually a component of an Inertial Measurement Unit or a stabilization system.

The Advanced Inertial Reference Sphere (AIRS) is a highly accurate inertial navigation system designed for use in the LGM-118A Peacekeeper ICBM, which was intended for precision nuclear strikes against Soviet missile silos.
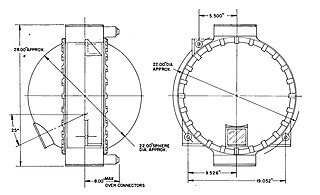
The ST-124-M3 inertial platform was a device for measuring acceleration and attitude of the Saturn V launch vehicle. It was carried by the Saturn V Instrument Unit, a 3-foot-high (0.91 m), 22-foot-diameter (6.7 m) section of the Saturn V that fit between the third stage (S-IVB) and the Apollo spacecraft. Its nomenclature means "stable table" (ST) for use in the Moon mission (M), and it has 3 gimbals.
Guidance, navigation and control is a branch of engineering dealing with the design of systems to control the movement of vehicles, especially, automobiles, ships, aircraft, and spacecraft. In many cases these functions can be performed by trained humans. However, because of the speed of, for example, a rocket's dynamics, human reaction time is too slow to control this movement. Therefore, systems—now almost exclusively digital electronic—are used for such control. Even in cases where humans can perform these functions, it is often the case that GNC systems provide benefits such as alleviating operator work load, smoothing turbulence, fuel savings, etc. In addition, sophisticated applications of GNC enable automatic or remote control.

An inertial navigation system is a navigation device that uses motion sensors (accelerometers), rotation sensors (gyroscopes) and a computer to continuously calculate by dead reckoning the position, the orientation, and the velocity of a moving object without the need for external references. Often the inertial sensors are supplemented by a barometric altimeter and sometimes by magnetic sensors (magnetometers) and/or speed measuring devices. INSs are used on mobile robots and on vehicles such as ships, aircraft, submarines, guided missiles, and spacecraft. Older INS systems generally used an inertial platform as their mounting point to the vehicle and the terms are sometimes considered synonymous.

The LN-3 inertial navigation system is an inertial navigation system (INS) that was developed in the 1960s by Litton Industries. It equipped the Lockheed F-104 Starfighter versions used as strike aircraft in European forces. An inertial navigation system is a system which continually determines the position of a vehicle from measurements made entirely within the vehicle using sensitive instruments. These instruments are accelerometers which detect and measure vehicle accelerations, and gyroscopes which act to hold the accelerometers in proper orientation.

An inertial measurement unit (IMU) is an electronic device that measures and reports a body's specific force, angular rate, and sometimes the orientation of the body, using a combination of accelerometers, gyroscopes, and sometimes magnetometers. When the magnetometer is included, IMUs are referred to as IMMUs.

Pressure reference system (PRS) is an enhancement of the inertial reference system and attitude and heading reference system designed to provide position angles measurements which are stable in time and do not suffer from long term drift caused by the sensor imperfections. The measurement system uses behavior of the International Standard Atmosphere where atmospheric pressure descends with increasing altitude and two pairs of measurement units. Each pair measures pressure at two different positions that are mechanically connected with known distance between units, e.g. the units are mounted at the tips of the wing. In horizontal flight, there is no pressure difference measured by the measurement system which means the position angle is zero. In case the airplane banks (to turn), the tips of the wings mutually change their positions, one is going up and the second one is going down, and the pressure sensors in every unit measure different values which are translated into a position angle.

The hemispherical resonator gyroscope (HRG), also called wine-glass gyroscope or mushroom gyro, is a compact, low-noise, high-performance angular rate or rotation sensor. An HRG is made using a thin solid-state hemispherical shell, anchored by a thick stem. This shell is driven to a flexural resonance by electrostatic forces generated by electrodes which are deposited directly onto separate fused-quartz structures that surround the shell. The gyroscopic effect is obtained from the inertial property of the flexural standing waves. Although the HRG is a mechanical system, it has no moving parts, and can be very compact.
