The Robocrane is a kind of manipulator resembling a Stewart platform but using an octahedral assembly of cables instead of struts. Like the Stewart platform, the Robocrane has six degrees of freedom (x, y, z, pitch, roll, & yaw).

A Gough–Stewart platform is a type of parallel manipulator that has six prismatic actuators, commonly hydraulic jacks or electric linear actuators, attached in pairs to three positions on the platform's baseplate, crossing over to three mounting points on a top plate. All 12 connections are made via universal joints. Devices placed on the top plate can be moved in the six degrees of freedom in which it is possible for a freely-suspended body to move. These are the three linear movements x, y, z, and the three rotations. Because of its motions, it is also called a six-axis platform or 6-DoF platform.

In geometry, an octahedron is a polyhedron with eight faces, twelve edges, and six vertices. The term is most commonly used to refer to the regular octahedron, a Platonic solid composed of eight equilateral triangles, four of which meet at each vertex.
It was developed by Dr. James S. Albus of the US National Institute of Standards and Technology (NIST), using the Real-Time Control System which is a hierarchical control system. Given its unusual ability to "fly" tools around a work site, it has many possible applications, including stone carving, ship building, bridge construction, inspection, pipe or beam fitting and welding.

James Sacra Albus was an American engineer, Senior NIST Fellow and founder and former chief of the Intelligent Systems Division of the Manufacturing Engineering Laboratory at the National Institute of Standards and Technology (NIST).
The National Institute of Standards and Technology (NIST) is a physical sciences laboratory, and a non-regulatory agency of the United States Department of Commerce. Its mission is to promote innovation and industrial competitiveness. NIST's activities are organized into laboratory programs that include nanoscale science and technology, engineering, information technology, neutron research, material measurement, and physical measurement.
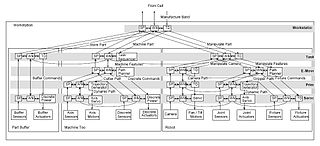
A hierarchical control system (HCS) is a form of control system in which a set of devices and governing software is arranged in a hierarchical tree. When the links in the tree are implemented by a computer network, then that hierarchical control system is also a form of networked control system.
Albus invented and developed a new generation of robot cranes based on six cables and six winches configured as a Stewart platform. The NIST RoboCraneTM has the capacity to lift and precisely manipulate heavy loads over large volumes with fine control in all six degrees of freedom. Laboratory RoboCranes have demonstrated the ability to manipulate tools such as saws, grinders, and welding torches, and to lift and precisely position heavy objects such as steel beams and cast iron pipe. In 1992, the RoboCrane was selected by Construction Equipment magazine as one of the 100 most significant new products of the year for construction and related industries. It was also selected by Popular Science magazine for the "Best of What's New" award as one of the 100 top products, technologies, and scientific achievements of 1992. [1]

Popular Science is an American quarterly magazine carrying popular science content, which refers to articles for the general reader on science and technology subjects. Popular Science has won over 58 awards, including the American Society of Magazine Editors awards for its journalistic excellence in both 2003 and 2004. With roots beginning in 1872, Popular Science has been translated into over 30 languages and is distributed to at least 45 countries.
A version of the RoboCrane has been commercially developed for the United States Air Force to enable rapid paint stripping, inspection, and repainting of very large military aircraft such as the C-5 Galaxy. RoboCrane is expected to save the United States Air Force $8 million annually at each of its maintenance facilities. This project was recognized in 2008 by a National Laboratories Award for technology transfer. Potential future applications of the RoboCrane include ship building, construction of high rise buildings, highways, bridges, tunnels, and port facilities; cargo handling, ship-to-ship cargo transfer on the high seas, radioactive and toxic waste clean-up; and underwater applications such as salvage, drilling, cable maintenance, and undersea waste site management. [1]

The United States Air Force (USAF) is the aerial and space warfare service branch of the United States Armed Forces. It is one of the five branches of the United States Armed Forces, and one of the seven American uniformed services. Initially formed as a part of the United States Army on 1 August 1907, the USAF was established as a separate branch of the U.S. Armed Forces on 18 September 1947 with the passing of the National Security Act of 1947. It is the youngest branch of the U.S. Armed Forces, and the fourth in order of precedence. The USAF is the largest and most technologically advanced air force in the world. The Air Force articulates its core missions as air and space superiority, global integrated intelligence, surveillance, and reconnaissance, rapid global mobility, global strike, and command and control.