In navigation, a state vector is a set of data describing exactly where an object is located in space, and how it is moving.
In navigation, a state vector is a set of data describing exactly where an object is located in space, and how it is moving.
A state vector typically will contain seven elements: three position coordinates, three velocity terms, and the time at which these values were valid.[ citation needed ] Mathematically, in order to describe positions in a N-dimensional space () then a state vector belongs to :
or simply
where is the position vector and is the velocity vector.
Since there is freedom to choose coordinate systems for position, a state vector may also be expressed in a variety of coordinate systems (e.g. the North east down coordinate system).

In vector calculus, the gradient of a scalar-valued differentiable function f of several variables is the vector field whose value at a point is the vector whose components are the partial derivatives of at . That is, for , its gradient is defined at the point in n-dimensional space as the vector

In mathematics, physics and engineering, a Euclidean vector or simply a vector is a geometric object that has magnitude and direction. Vectors can be added to other vectors according to vector algebra. A Euclidean vector is frequently represented by a directed line segment, or graphically as an arrow connecting an initial pointA with a terminal pointB, and denoted by .
Kinematics is a subfield of physics, developed in classical mechanics, that describes the motion of points, bodies (objects), and systems of bodies without considering the forces that cause them to move. Kinematics, as a field of study, is often referred to as the "geometry of motion" and is occasionally seen as a branch of mathematics. A kinematics problem begins by describing the geometry of the system and declaring the initial conditions of any known values of position, velocity and/or acceleration of points within the system. Then, using arguments from geometry, the position, velocity and acceleration of any unknown parts of the system can be determined. The study of how forces act on bodies falls within kinetics, not kinematics. For further details, see analytical dynamics.

In linear algebra, the column space of a matrix A is the span of its column vectors. The column space of a matrix is the image or range of the corresponding matrix transformation.

In the theory of vector spaces, a set of vectors is said to be linearly dependent if there is a nontrivial linear combination of the vectors that equals the zero vector. If no such linear combination exists, then the vectors are said to be linearly independent. These concepts are central to the definition of dimension.
In mathematics, the dot product or scalar product is an algebraic operation that takes two equal-length sequences of numbers, and returns a single number. In Euclidean geometry, the dot product of the Cartesian coordinates of two vectors is widely used. It is often called the inner product of Euclidean space, even though it is not the only inner product that can be defined on Euclidean space.

In mathematics, a square matrix is a matrix with the same number of rows and columns. An n-by-n matrix is known as a square matrix of order . Any two square matrices of the same order can be added and multiplied.

In mathematics, a unit vector in a normed vector space is a vector of length 1. A unit vector is often denoted by a lowercase letter with a circumflex, or "hat", as in .
In the mathematical field of differential geometry, a metric tensor allows defining distances and angles near each point of a surface, in the same way as inner product allows defining distances and angles in Euclidean spaces. More precisely, a metric tensor at a point of a manifold is a bilinear form defined on the tangent space at this point.

In Euclidean geometry, a translation is a geometric transformation that moves every point of a figure, shape or space by the same distance in a given direction. A translation can also be interpreted as the addition of a constant vector to every point, or as shifting the origin of the coordinate system. In a Euclidean space, any translation is an isometry.

In linear algebra and functional analysis, a projection is a linear transformation from a vector space to itself such that . That is, whenever is applied twice to any vector, it gives the same result as if it were applied once. It leaves its image unchanged. This definition of "projection" formalizes and generalizes the idea of graphical projection. One can also consider the effect of a projection on a geometrical object by examining the effect of the projection on points in the object.
In control engineering, a state-space representation is a mathematical model of a physical system as a set of input, output and state variables related by first-order differential equations or difference equations. State variables are variables whose values evolve over time in a way that depends on the values they have at any given time and on the externally imposed values of input variables. Output variables’ values depend on the values of the state variables.
In linear algebra, linear transformations can be represented by matrices. If is a linear transformation mapping to and is a column vector with entries, then
In linear algebra, a rotation matrix is a transformation matrix that is used to perform a rotation in Euclidean space. For example, using the convention below, the matrix

In mathematics, an ordered basis of a vector space of finite dimension n allows representing uniquely any element of the vector space by a coordinate vector, which is a sequence of n scalars called coordinates. If two different bases are considered, the coordinate vector that represents a vector v on one basis is, in general, different from the coordinate vector that represents v on the other basis. A change of basis consists of converting every assertion expressed in terms of coordinates relative to one basis into an assertion expressed in terms of coordinates relative to the other basis.

Screw theory is the algebraic calculation of pairs of vectors, such as forces and moments or angular and linear velocity, that arise in the kinematics and dynamics of rigid bodies. The mathematical framework was developed by Sir Robert Stawell Ball in 1876 for application in kinematics and statics of mechanisms.
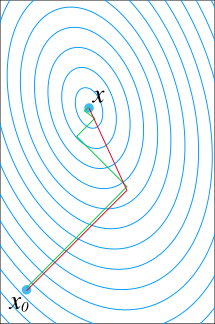
In mathematics, the conjugate gradient method is an algorithm for the numerical solution of particular systems of linear equations, namely those whose matrix is positive-definite. The conjugate gradient method is often implemented as an iterative algorithm, applicable to sparse systems that are too large to be handled by a direct implementation or other direct methods such as the Cholesky decomposition. Large sparse systems often arise when numerically solving partial differential equations or optimization problems.
Farkas' lemma is a solvability theorem for a finite system of linear inequalities in mathematics. It was originally proven by the Hungarian mathematician Gyula Farkas. Farkas' lemma is the key result underpinning the linear programming duality and has played a central role in the development of mathematical optimization. It is used amongst other things in the proof of the Karush–Kuhn–Tucker theorem in nonlinear programming. Remarkably, in the area of the foundations of quantum theory, the lemma also underlies the complete set of Bell inequalities in the form of necessary and sufficient conditions for the existence of a local hidden-variable theory, given data from any specific set of measurements.
In geometry, various formalisms exist to express a rotation in three dimensions as a mathematical transformation. In physics, this concept is applied to classical mechanics where rotational kinematics is the science of quantitative description of a purely rotational motion. The orientation of an object at a given instant is described with the same tools, as it is defined as an imaginary rotation from a reference placement in space, rather than an actually observed rotation from a previous placement in space.

In continuum mechanics, the strain-rate tensor or rate-of-strain tensor is a physical quantity that describes the rate of change of the deformation of a material in the neighborhood of a certain point, at a certain moment of time. It can be defined as the derivative of the strain tensor with respect to time, or as the symmetric component of the Jacobian matrix of the flow velocity. In fluid mechanics it also can be described as the velocity gradient, a measure of how the velocity of a fluid changes between different points within the fluid. Though the term can refer to the differences in velocity between layers of flow in a pipe, it is often used to mean the gradient of a flow's velocity with respect to its coordinates. The concept has implications in a variety of areas of physics and engineering, including magnetohydrodynamics, mining and water treatment.






