
In physics, angular momentum is the rotational equivalent of linear momentum. It is an important quantity in physics because it is a conserved quantity—the total angular momentum of a closed system remains constant.

A sphere is a perfectly round geometrical object in three-dimensional space that is the surface of a completely round ball.
In physics, a moment is an expression involving the product of a distance and another physical quantity, and in this way it accounts for how the physical quantity is located or arranged.
This is a list of some vector calculus formulae for working with common curvilinear coordinate systems.
Dynamical simulation, in computational physics, is the simulation of systems of objects that are free to move, usually in three dimensions according to Newton's laws of dynamics, or approximations thereof. Dynamical simulation is used in computer animation to assist animators to produce realistic motion, in industrial design, and in video games. Body movement is calculated using time integration methods.
In mathematics—in particular, in multivariable calculus—a volume integral refers to an integral over a 3-dimensional domain, that is, it is a special case of multiple integrals. Volume integrals are especially important in physics for many applications, for example, to calculate flux densities.

In applied mechanics, bending characterizes the behavior of a slender structural element subjected to an external load applied perpendicularly to a longitudinal axis of the element.
The 2nd moment of area, or second area moment and also known as the area moment of inertia is a geometrical property of an area which reflects how its points are distributed with regard to an arbitrary axis. The second moment of area is typically denoted with either an or with a . In both cases, it is calculated with a multiple integral over the object in question. Its dimension is L (length) to the fourth power. Its unit of dimension when working with the International System of Units is meters to the fourth power, m4, or inches to the fourth power, in4, when working in the Imperial System of Units.

The multiple integral is a definite integral of a function of more than one real variable, for example, f(x, y) or f(x, y, z). Integrals of a function of two variables over a region in R2 are called double integrals, and integrals of a function of three variables over a region of R3 are called triple integrals. For multiple integrals of a single-variable function, see the Cauchy formula for repeated integration.
In mathematics, a planar lamina is a closed set in a plane of mass and surface density such that:
The polar moment of inertia, also known as second polar moment of area, is a quantity used to describe resistance to torsional deformation (deflection), in cylindrical objects with an invariant cross-section and no significant warping or out-of-plane deformation. It is a constituent of the second moment of area, linked through the perpendicular axis theorem. Where the planar second moment of area describes an object's resistance to deflection (bending) when subjected to a force applied to a plane parallel to the central axis, the polar second moment of area describes an object's resistance to deflection when subjected to a moment applied in a plane perpendicular to the object's central axis. Similar to planar second moment of area calculations, the polar second moment of area is often denoted as . While several engineering textbooks and academic publications also denote it as or , this designation should be given careful attention so that it does not become confused with the torsion constant, , used for non-cylindrical objects.
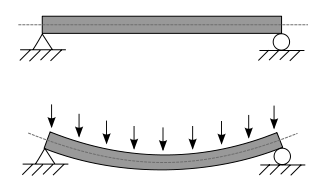
The neutral axis is an axis in the cross section of a beam or shaft along which there are no longitudinal stresses or strains. If the section is symmetric, isotropic and is not curved before a bend occurs, then the neutral axis is at the geometric centroid. All fibers on one side of the neutral axis are in a state of tension, while those on the opposite side are in compression.
In physics, the perpendicular axis theorem can be used to determine the second polar moment of area of a rigid object that lies entirely within a plane, about an axis perpendicular to the plane, given the moments of inertia of the object about two perpendicular axes lying within the plane. The axes must all pass through a single point in the plane.
In the mathematical theory of conformal and quasiconformal mappings, the extremal length of a collection of curves is a measure of the size of that is invariant under conformal mappings. More specifically, suppose that is an open set in the complex plane and is a collection of paths in and is a conformal mapping. Then the extremal length of is equal to the extremal length of the image of under . One also works with the conformal modulus of , the reciprocal of the extremal length. The fact that extremal length and conformal modulus are conformal invariants of makes them useful tools in the study of conformal and quasi-conformal mappings. One also works with extremal length in dimensions greater than two and certain other metric spaces, but the following deals primarily with the two dimensional setting.
In classical mechanics, Euler's laws of motion are equations of motion which extend Newton's laws of motion for point particle to rigid body motion. They were formulated by Leonhard Euler about 50 years after Isaac Newton formulated his laws.
A column can buckle due to its own weight with no other direct forces acting on it, in a failure mode called self-buckling. In conventional column buckling problems, the self-weight is often neglected since it is assumed to be small when compared to the applied axial loads. However, when this assumption is not valid, it is important to take the self-buckling into account.













