
The Viking 2 mission was part of the American Viking program to Mars, and consisted of an orbiter and a lander essentially identical to that of the Viking 1 mission. Viking 2 was operational on Mars for 1281 sols. The Viking 2 lander operated on the surface for 1,316 days, or 1281 sols, and was turned off on April 12, 1980, when its batteries failed. The orbiter worked until July 25, 1978, returning almost 16,000 images in 706 orbits around Mars.

Mars Pathfinder is an American robotic spacecraft that landed a base station with a roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight, 10.6 kg (23 lb) wheeled robotic Mars rover named Sojourner, the first rover to operate outside the Earth–Moon system.

A lander is a spacecraft that descends towards, then comes to rest on the surface of an astronomical body other than Earth. In contrast to an impact probe, which makes a hard landing that damages or destroys the probe upon reaching the surface, a lander makes a soft landing after which the probe remains functional.

NASA's Mars Exploration Rover (MER) mission was a robotic space mission involving two Mars rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the launch of the two rovers to explore the Martian surface and geology; both landed on Mars at separate locations in January 2004. Both rovers far outlived their planned missions of 90 Martian solar days: MER-A Spirit was active until March 22, 2010, while MER-B Opportunity was active until June 10, 2018.

Mars Science Laboratory (MSL) is a robotic space probe mission to Mars launched by NASA on November 26, 2011, which successfully landed Curiosity, a Mars rover, in Gale Crater on August 6, 2012. The overall objectives include investigating Mars' habitability, studying its climate and geology, and collecting data for a human mission to Mars. The rover carries a variety of scientific instruments designed by an international team.

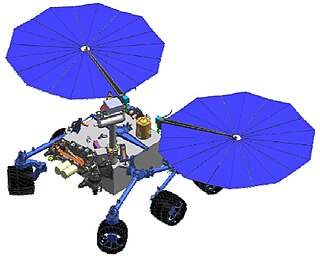
The Mars Surveyor 2001 project was a multi-part Mars exploration mission intended as a follow-up to Mars Surveyor '98. After the two probes of the 1998 project, Mars Climate Orbiter and Mars Polar Lander, were both lost, NASA's "better, faster, cheaper" exploration philosophy was re-evaluated, with a particular eye on the two 2001 project probes. As a result, the mission, along with the launch of its lander and rover, were canceled in May 2000, but the decision was made to continue development with its orbiter counterpart. The orbiter launched as 2001 Mars Odyssey in April 2001, in a mission independent of the Mars Surveyor project, and reached Mars in October 2001. After being placed in a cleanroom in 2001 and stored since, the nearly-completed lander component was eventually reused to fly the Phoenix mission, which launched in August 2007 and landed successfully on Mars in May 2008.

A rover is a planetary surface exploration device designed to move over the rough surface of a planet or other planetary mass celestial bodies. Some rovers have been designed as land vehicles to transport members of a human spaceflight crew; others have been partially or fully autonomous robots. Rovers are typically created to land on another planet via a lander-style spacecraft, tasked to collect information about the terrain, and to take crust samples such as dust, soil, rocks, and even liquids. They are essential tools in space exploration.

A Mars landing is a landing of a spacecraft on the surface of Mars. Of multiple attempted Mars landings by robotic, uncrewed spacecraft, ten have had successful soft landings. There have also been studies for a possible human mission to Mars including a landing, but none have been attempted.

Northern Light was a concept mission for a robotic mission to Mars that would consist of a lander and a rover, being studied by a consortium of Canadian universities, companies and organisations. The primary contractor for the spacecraft was Thoth Technology Inc.
The Mars Astrobiology Explorer-Cacher (MAX-C), also known as Mars 2018 mission, was a NASA concept for a Mars rover mission, proposed to be launched in 2018 together with the European ExoMars rover. The MAX-C rover concept was cancelled in April 2011 due to budget cuts.
Rosalind Franklin, previously known as the ExoMars rover, is a planned robotic Mars rover, part of the international ExoMars programme led by the European Space Agency and the Russian Roscosmos State Corporation. The mission was scheduled to launch in July 2020, but was postponed to 2022. The Russian invasion of Ukraine has caused an indefinite delay of the programme, as the member states of the ESA voted to suspend the joint mission with Russia; in July 2022, ESA terminated its cooperation on the project with Russia. As of May 2022, the launch of the rover is not expected to occur before 2028 due to the need for a new non-Russian landing platform.

Curiosity is a car-sized Mars rover exploring Gale crater and Mount Sharp on Mars as part of NASA's Mars Science Laboratory (MSL) mission. Curiosity was launched from Cape Canaveral (CCAFS) on November 26, 2011, at 15:02:00 UTC and landed on Aeolis Palus inside Gale crater on Mars on August 6, 2012, 05:17:57 UTC. The Bradbury Landing site was less than 2.4 km (1.5 mi) from the center of the rover's touchdown target after a 560 million km (350 million mi) journey.
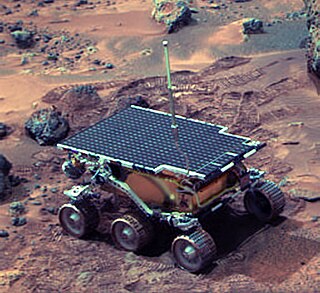
Sojourner is a robotic Mars rover that landed in the Ares Vallis channel in the Chryse Planitia region of the Oxia Palus quadrangle on July 4, 1997. Sojourner was operational on Mars for 92 sols. It was the first wheeled vehicle to rove on a planet other than Earth and formed part of the Mars Pathfinder mission.
MELOS is a Japanese rover mission concept under study for an engineering demonstration of precision landing, and to look for possible biosignatures on Mars using a rover. JAXA has not published updates since 2015.

Tianwen-1 Chinese: 天问一号 is an interplanetary mission by the China National Space Administration (CNSA) which sent a robotic spacecraft to Mars, consisting of 6 spacecraft: an orbiter, two deployable cameras, lander, remote camera, and the Zhurong rover. The spacecraft, with a total mass of nearly five tons, is one of the heaviest probes launched to Mars and carries 14 scientific instruments. It is the first in a series of planned missions undertaken by CNSA as part of its Planetary Exploration of China program.

Martian Moons eXploration (MMX) is a robotic space probe set for launch in 2026 to bring back the first samples from Mars' largest moon Phobos. Developed by the Japan Aerospace Exploration Agency (JAXA) and announced on 9 June 2015, MMX will land and collect samples from Phobos once or twice, along with conducting Deimos flyby observations and monitoring Mars's climate.

Perseverance, nicknamed Percy, is a car-sized Mars rover designed to explore the Jezero crater on Mars as part of NASA's Mars 2020 mission. It was manufactured by the Jet Propulsion Laboratory and launched on July 30, 2020, at 11:50 UTC. Confirmation that the rover successfully landed on Mars was received on February 18, 2021, at 20:55 UTC. As of 10 May 2024, Perseverance has been active on Mars for 1146 sols since its landing. Following the rover's arrival, NASA named the landing site Octavia E. Butler Landing.
The Mars 2020 mission, consisting of the rover Perseverance and helicopter Ingenuity, was launched on July 30, 2020, and landed in Jezero crater on Mars on February 18, 2021. As of May 10, 2024, Perseverance has been on the planet for 1146 sols. Ingenuity operated for 1042 sols until its rotor blades, possibly all four, were damaged during the landing of flight 72 on January 18, 2024, causing NASA to retire the craft.
The Planetary Exploration of China, also known as Tianwen, is the robotic interplanetary spaceflight program conducted by the China National Space Administration (CNSA). The program aims to explore planets of the Solar System, starting from Mars, and will be expanded to Jupiter and more in the future.