Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels.
Flow measurement is the quantification of bulk fluid movement. Flow can be measured using devices called flowmeters in various ways. The common types of flowmeters with industrial applications are listed below:

Time of flight (ToF) is the measurement of the time taken by an object, particle or wave to travel a distance through a medium. This information can then be used to measure velocity or path length, or as a way to learn about the particle or medium's properties. The traveling object may be detected directly or indirectly. Time of flight technology has found valuable applications in the monitoring and characterization of material and biomaterials, hydrogels included.
Sound intensity, also known as acoustic intensity, is defined as the power carried by sound waves per unit area in a direction perpendicular to that area. The SI unit of intensity, which includes sound intensity, is the watt per square meter (W/m2). One application is the noise measurement of sound intensity in the air at a listener's location as a sound energy quantity.

Simultaneous localization and mapping (SLAM) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. While this initially appears to be a chicken or the egg problem, there are several algorithms known to solve it in, at least approximately, tractable time for certain environments. Popular approximate solution methods include the particle filter, extended Kalman filter, covariance intersection, and GraphSLAM. SLAM algorithms are based on concepts in computational geometry and computer vision, and are used in robot navigation, robotic mapping and odometry for virtual reality or augmented reality.

An acoustic mirror is a passive device used to reflect and focus (concentrate) sound waves. Parabolic acoustic mirrors are widely used in parabolic microphones to pick up sound from great distances, employed in surveillance and reporting of outdoor sporting events. Pairs of large parabolic acoustic mirrors which function as "whisper galleries" are displayed in science museums to demonstrate sound focusing.
Sound localization is a listener's ability to identify the location or origin of a detected sound in direction and distance.
(Acoustic homing) is the process in which a system uses the sound or acoustic signals of a target or destination to guide a moving object. There are two types of acoustic homing: passive acoustic homing and active acoustic homing. Objects using passive acoustic homing rely on detecting acoustic emissions produced by the target. Conversely, objects using active acoustic homing make use of sonar to emit a signal and detect its reflection off the target. The signal detected is then processed by the system to determine the proper response for the object. Acoustic homing is useful for applications where other forms of navigation and tracking can be ineffective. It is commonly used in environments where radio or GPS signals can not be detected, such as underwater.

A sonobuoy is a relatively small buoy – typically 13 cm (5 in) diameter and 91 cm (3 ft) long – expendable sonar system that is dropped/ejected from aircraft or ships conducting anti-submarine warfare or underwater acoustic research.
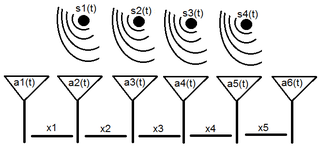
Array processing is a wide area of research in the field of signal processing that extends from the simplest form of 1 dimensional line arrays to 2 and 3 dimensional array geometries. Array structure can be defined as a set of sensors that are spatially separated, e.g. radio antenna and seismic arrays. The sensors used for a specific problem may vary widely, for example microphones, accelerometers and telescopes. However, many similarities exist, the most fundamental of which may be an assumption of wave propagation. Wave propagation means there is a systemic relationship between the signal received on spatially separated sensors. By creating a physical model of the wave propagation, or in machine learning applications a training data set, the relationships between the signals received on spatially separated sensors can be leveraged for many applications.
Beamforming or spatial filtering is a signal processing technique used in sensor arrays for directional signal transmission or reception. This is achieved by combining elements in an antenna array in such a way that signals at particular angles experience constructive interference while others experience destructive interference. Beamforming can be used at both the transmitting and receiving ends in order to achieve spatial selectivity. The improvement compared with omnidirectional reception/transmission is known as the directivity of the array.
Pseudo-range multilateration, often simply multilateration (MLAT) when in context, is a technique for determining the position of an unknown point, such as a vehicle, based on measurement of the times of arrival (TOAs) of energy waves traveling between the unknown point and multiple stations at known locations. When the waves are transmitted by the vehicle, MLAT is used for surveillance; when the waves are transmitted by the stations, MLAT is used for navigation. In either case, the stations' clocks are assumed synchronized but the vehicle's clock is not.
In land warfare, artillery sound ranging is a method of determining the coordinates of a hostile battery using data derived from the sound of its guns firing, so called target acquisition.
Analysis of sound and acoustics plays a role in such engineering tasks as product design, production test, machine performance, and process control. For instance, product design can require modification of sound level or noise for compliance with standards from ANSI, IEC, and ISO. The work might also involve design fine-tuning to meet market expectations. Here, examples include tweaking an automobile door latching mechanism to impress a consumer with a satisfying click or modifying an exhaust manifold to change the tone of an engine's rumble. Aircraft designers are also using acoustic instrumentation to reduce the noise generated on takeoff and landing.

Underwater acoustics is the study of the propagation of sound in water and the interaction of the mechanical waves that constitute sound with the water, its contents and its boundaries. The water may be in the ocean, a lake, a river or a tank. Typical frequencies associated with underwater acoustics are between 10 Hz and 1 MHz. The propagation of sound in the ocean at frequencies lower than 10 Hz is usually not possible without penetrating deep into the seabed, whereas frequencies above 1 MHz are rarely used because they are absorbed very quickly.
Geophysical MASINT is a branch of Measurement and Signature Intelligence (MASINT) that involves phenomena transmitted through the earth and manmade structures including emitted or reflected sounds, pressure waves, vibrations, and magnetic field or ionosphere disturbances.
An acoustic camera is an imaging device used to locate sound sources and to characterize them. It consists of a group of microphones, also called a microphone array, from which signals are simultaneously collected and processed to form a representation of the location of the sound sources.
3D sound localization refers to an acoustic technology that is used to locate the source of a sound in a three-dimensional space. The source location is usually determined by the direction of the incoming sound waves and the distance between the source and sensors. It involves the structure arrangement design of the sensors and signal processing techniques.
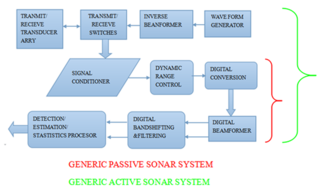
Sonar systems are generally used underwater for range finding and detection. Active sonar emits an acoustic signal, or pulse of sound, into the water. The sound bounces off the target object and returns an “echo” to the sonar transducer. Unlike active sonar, passive sonar does not emit its own signal, which is an advantage for military vessels. But passive sonar cannot measure the range of an object unless it is used in conjunction with other passive listening devices. Multiple passive sonar devices must be used for triangulation of a sound source. No matter whether active sonar or passive sonar, the information included in the reflected signal can not be used without technical signal processing. To extract the useful information from the mixed signal, some steps are taken to transfer the raw acoustic data.

In virtual reality (VR) and augmented reality (AR), a pose tracking system detects the precise pose of head-mounted displays, controllers, other objects or body parts within Euclidean space. Pose tracking is often referred to as 6DOF tracking, for the six degrees of freedom in which the pose is often tracked.