Related Research Articles

The School of Informatics is an academic unit of the University of Edinburgh, in Scotland, responsible for research, teaching, outreach and commercialisation in informatics. It was created in 1998 from the former Department of Artificial Intelligence, the Centre for Cognitive Science and the Department of Computer Science, along with the Artificial Intelligence Applications Institute (AIAI) and the Human Communication Research Centre.
Random sample consensus (RANSAC) is an iterative method to estimate parameters of a mathematical model from a set of observed data that contains outliers, when outliers are to be accorded no influence on the values of the estimates. Therefore, it also can be interpreted as an outlier detection method. It is a non-deterministic algorithm in the sense that it produces a reasonable result only with a certain probability, with this probability increasing as more iterations are allowed. The algorithm was first published by Fischler and Bolles at SRI International in 1981. They used RANSAC to solve the Location Determination Problem (LDP), where the goal is to determine the points in the space that project onto an image into a set of landmarks with known locations.
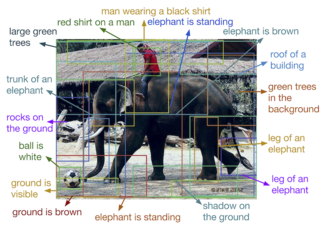
Automatic image annotation is the process by which a computer system automatically assigns metadata in the form of captioning or keywords to a digital image. This application of computer vision techniques is used in image retrieval systems to organize and locate images of interest from a database.
In computer vision, the fundamental matrix is a 3×3 matrix which relates corresponding points in stereo images. In epipolar geometry, with homogeneous image coordinates, x and x′, of corresponding points in a stereo image pair, Fx describes a line on which the corresponding point x′ on the other image must lie. That means, for all pairs of corresponding points holds
Structure from motion (SfM) is a photogrammetric range imaging technique for estimating three-dimensional structures from two-dimensional image sequences that may be coupled with local motion signals. It is studied in the fields of computer vision and visual perception. In biological vision, SfM refers to the phenomenon by which humans can recover 3D structure from the projected 2D (retinal) motion field of a moving object or scene.

Andrew Blake FREng, FRS, is a British scientist, former laboratory director of Microsoft Research Cambridge and Microsoft Distinguished Scientist, former director of the Alan Turing Institute, Chair of the Samsung AI Centre in Cambridge, honorary professor at the University of Cambridge, Fellow of Clare Hall, Cambridge, and a leading researcher in computer vision.
In photogrammetry and computer stereo vision, bundle adjustment is simultaneous refining of the 3D coordinates describing the scene geometry, the parameters of the relative motion, and the optical characteristics of the camera(s) employed to acquire the images, given a set of images depicting a number of 3D points from different viewpoints. Its name refers to the geometrical bundles of light rays originating from each 3D feature and converging on each camera's optical center, which are adjusted optimally according to an optimality criterion involving the corresponding image projections of all points.
In computer vision, the bag-of-words model sometimes called bag-of-visual-words model can be applied to image classification or retrieval, by treating image features as words. In document classification, a bag of words is a sparse vector of occurrence counts of words; that is, a sparse histogram over the vocabulary. In computer vision, a bag of visual words is a vector of occurrence counts of a vocabulary of local image features.
Caltech 101 is a data set of digital images created in September 2003 and compiled by Fei-Fei Li, Marco Andreetto, Marc 'Aurelio Ranzato and Pietro Perona at the California Institute of Technology. It is intended to facilitate Computer Vision research and techniques and is most applicable to techniques involving image recognition classification and categorization. Caltech 101 contains a total of 9,146 images, split between 101 distinct object categories and a background category. Provided with the images are a set of annotations describing the outlines of each image, along with a Matlab script for viewing.

Pedestrian detection is an essential and significant task in any intelligent video surveillance system, as it provides the fundamental information for semantic understanding of the video footages. It has an obvious extension to automotive applications due to the potential for improving safety systems. Many car manufacturers offer this as an ADAS option in 2017.
The International Conference on Computer Vision (ICCV) is a research conference sponsored by the Institute of Electrical and Electronics Engineers (IEEE) held every other year. It is considered to be one of the top conferences in computer vision, alongside CVPR and ECCV, and it is held on years in which ECCV is not.
The European Conference on Computer Vision (ECCV) is a biennial research conference with the proceedings published by Springer Science+Business Media. Similar to ICCV in scope and quality, it is held those years which ICCV is not. It is considered to be one of the top conferences in computer vision, alongside CVPR and ICCV, with an 'A' rating from the Australian Ranking of ICT Conferences and an 'A1' rating from the Brazilian ministry of education. The acceptance rate for ECCV 2010 was 24.4% for posters and 3.3% for oral presentations.
The British Machine Vision Conference (BMVC) is the British Machine Vision Association (BMVA) annual conference on machine vision, image processing, and pattern recognition. It is one of the major international conferences on computer vision and related areas, held in UK. Particularly, BMVC is ranked as A1 by Qualis, and B by ERA. The upcoming 30th BMVC will be hosted by Cardiff University in September 2019.
Richard I. Hartley is an Australian computer scientist and a professor at the Australian National University, where he is head of the Computer Vision group in the Research School of Engineering.

Sir John Michael Brady is an Emeritus professor of Oncological Imaging at the University of Oxford. He has been a Fellow of Keble College, Oxford since 1985 and was elected a foreign associate member of the French Academy of Sciences in 2015. He was formerly BP Professor of Information Engineering at Oxford from 1985 to 2010 and a Senior Research Scientist in the MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) in Cambridge, Massachusetts, from 1980 to 1985.
Stefano Soatto is professor of computer science at the University of California, Los Angeles (UCLA), in Los Angeles, CA, where he is also professor of electrical engineering and founding director of the UCLA Vision Lab.
Andrew Fitzgibbon FREng is an Irish researcher in computer vision. Since 2022, he has worked at Graphcore.

Michael J. Black is an American-born computer scientist working in Tübingen, Germany. He is a founding director at the Max Planck Institute for Intelligent Systems where he leads the Perceiving Systems Department in research focused on computer vision, machine learning, and computer graphics. He is also an Honorary Professor at the University of Tübingen.
Sanja Fidler is an associate professor at the University of Toronto and Director of AI at Nvidia. She is also a co-founder of the Vector Institute, University of Toronto and Canada CIFAR AI Chair. Her research is in the areas of computer vision and artificial intelligence.
Lourdes de Agapito Vicente is the Professor of 3D Vision in the department of computer science at University College London (UCL) where she leads a research group with a focus on 3D dynamic scene understanding from video. Agapito is an elected member of the Executive Committee of the British Machine Vision Association. Furthermore, she is the co-founder of the software company Synthesia.
References
- ↑ Zisserman, Andrew. at viaf.org
- 1 2 3 "Professor Andrew Zisserman FRS". London: Royal Society. Archived from the original on 17 November 2015.
- ↑ Andrew Zisserman at the Mathematics Genealogy Project
- ↑ Andrew Zisserman at videolectures.net
- ↑ "Google's DeepMind Acqui-Hires Two AI Teams in the UK, Partners with Oxford".
- ↑ Zisserman, A. (1984). Fresh approaches to magnetostatic field problems with the emphasis on analytical techniques (PhD thesis). Sunderland Polytechnic.
- 1 2 3 4 Andrew Fitzgibbon (2008) "Andrew Zisserman, BMVA Distinguished Fellow 2008 Archived 21 September 2013 at the Wayback Machine " Bmva.org
- ↑ Kadir, Timor; Zisserman, Andrew; Brady, Michael (2004). "An Affine Invariant Salient Region Detector". Computer Vision - ECCV 2004. Lecture Notes in Computer Science. Vol. 3021. pp. 228–241. doi:10.1007/978-3-540-24670-1_18. ISBN 978-3-540-21984-2. ISSN 0302-9743.
- ↑ VIBES EU Project Annex 1(2000) "VIBES EU Project Consortium Description"
- ↑ Andrew Zisserman List of publications from the DBLP Bibliography Server. Retrieved 20 May 2009.
- ↑ Multiple View Geometry in Computer Vision Second Edition. Retrieved 20 May 2009.
- ↑ "Awards – ICCV 2013". Iccv2013.org. Retrieved 30 March 2016.
- ↑ Royal Society Milner Award
| General | |
|---|---|
| National libraries | |
| Scientific databases | |
| Other | |