
The foot is an anatomical structure found in many vertebrates. It is the terminal portion of a limb which bears weight and allows locomotion. In many animals with feet, the foot is a separate organ at the terminal part of the leg made up of one or more segments or bones, generally including claws or nails.

Running is a method of terrestrial locomotion allowing humans and other animals to move rapidly on foot. Running is a type of gait characterized by an aerial phase in which all feet are above the ground. This is in contrast to walking, where one foot is always in contact with the ground, the legs are kept mostly straight and the center of gravity vaults over the stance leg or legs in an inverted pendulum fashion. A feature of a running body from the viewpoint of spring-mass mechanics is that changes in kinetic and potential energy within a stride occur simultaneously, with energy storage accomplished by springy tendons and passive muscle elasticity. The term running can refer to any of a variety of speeds ranging from jogging to sprinting.
Walking is one of the main gaits of locomotion among legged animals. Walking is typically slower than running and other gaits. Walking is defined by an 'inverted pendulum' gait in which the body vaults over the stiff limb or limbs with each step. This applies regardless of the usable number of limbs—even arthropods, with six, eight, or more limbs, walk.

Gait is the pattern of movement of the limbs of animals, including humans, during locomotion over a solid substrate. Most animals use a variety of gaits, selecting gait based on speed, terrain, the need to maneuver, and energetic efficiency. Different animal species may use different gaits due to differences in anatomy that prevent use of certain gaits, or simply due to evolved innate preferences as a result of habitat differences. While various gaits are given specific names, the complexity of biological systems and interacting with the environment make these distinctions "fuzzy" at best. Gaits are typically classified according to footfall patterns, but recent studies often prefer definitions based on mechanics. The term typically does not refer to limb-based propulsion through fluid mediums such as water or air, but rather to propulsion across a solid substrate by generating reactive forces against it.

A gait is a pattern of limb movements made during locomotion. Human gaits are the various ways in which a human can move, either naturally or as a result of specialized training. Human gait is defined as bipedal, biphasic forward propulsion of center of gravity of the human body, in which there are alternate sinuous movements of different segments of the body with least expenditure of energy. Different gait patterns are characterized by differences in limb-movement patterns, overall velocity, forces, kinetic and potential energy cycles, and changes in the contact with the ground.
The snatch is the first of two lifts contested in the sport of weightlifting followed by the clean and jerk. The objective of the snatch is to lift the barbell from the ground to overhead in one continuous motion. There are four main styles of snatch used: squat snatch, split snatch, power snatch, and muscle snatch. The squat snatch and split snatch are the most common styles used in competition while power snatch and muscle snatch are mostly used for training purposes.

Equine conformation evaluates a horse's bone structure, musculature, and its body proportions in relation to each other. Undesirable conformation can limit the ability to perform a specific task. Although there are several faults with universal disadvantages, a horse's conformation is usually judged by what its intended use may be. Thus "form to function" is one of the first set of traits considered in judging conformation. A horse with poor form for a Grand Prix show jumper could have excellent conformation for a World Champion cutting horse, or to be a champion draft horse. Every horse has good and bad points of its conformation and many horses excel even with conformation faults.

Foot drop is a gait abnormality in which the dropping of the forefoot happens due to weakness, irritation or damage to the common fibular nerve including the sciatic nerve, or paralysis of the muscles in the anterior portion of the lower leg. It is usually a symptom of a greater problem, not a disease in itself. Foot drop is characterized by inability or impaired ability to raise the toes or raise the foot from the ankle (dorsiflexion). Foot drop may be temporary or permanent, depending on the extent of muscle weakness or paralysis and it can occur in one or both feet. In walking, the raised leg is slightly bent at the knee to prevent the foot from dragging along the ground.
In medicine, physiotherapy, chiropractic, and osteopathy the hip examination, or hip exam, is undertaken when a patient has a complaint of hip pain and/or signs and/or symptoms suggestive of hip joint pathology. It is a physical examination maneuver.
Gait training or gait rehabilitation is the act of learning how to walk, either as a child, or, more frequently, after sustaining an injury or disability. Normal human gait is a complex process, which happens due to co-ordinated movements of the whole of the body, requiring the whole of Central Nervous System - the brain and spinal cord, to function properly. Any disease process affecting the brain, spinal cord, peripheral nerves emerging from them supplying the muscles, or the muscles itself can cause deviations of gait. The process of relearning how to walk is generally facilitated by Physiatrists or Rehabilitation medicine (PM&R) consultants, physical therapists or physiotherapists, along with occupational therapists and other allied specialists. The most common cause for gait impairment is due to an injury of one or both legs. Gait training is not simply re-educating a patient on how to walk, but also includes an initial assessment of their gait cycle - Gait analysis, creation of a plan to address the problem, as well as teaching the patient on how to walk on different surfaces. Assistive devices and splints (orthosis) are often used in gait training, especially with those who have had surgery or an injury on their legs, but also with those who have balance or strength impairments as well.
A GALS screen is an examination used by doctors and other healthcare professionals to detect locomotor abnormalities and functional disability relating to gait, arms, legs and the spine.
Lameness is an abnormal gait or stance of an animal that is the result of dysfunction of the locomotor system. In the horse, it is most commonly caused by pain, but can be due to neurologic or mechanical dysfunction. Lameness is a common veterinary problem in racehorses, sport horses, and pleasure horses. It is one of the most costly health problems for the equine industry, both monetarily for the cost of diagnosis and treatment, and for the cost of time off resulting in loss-of-use.
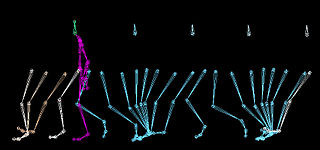
The evolution of human bipedalism, which began in primates about four million years ago, or as early as seven million years ago with Sahelanthropus, or about 12 million years ago with Danuvius guggenmosi, has led to morphological alterations to the human skeleton including changes to the arrangement and size of the bones of the foot, hip size and shape, knee size, leg length, and the shape and orientation of the vertebral column. The evolutionary factors that produced these changes have been the subject of several theories.

Comparative foot morphology involves comparing the form of distal limb structures of a variety of terrestrial vertebrates. Understanding the role that the foot plays for each type of organism must take account of the differences in body type, foot shape, arrangement of structures, loading conditions and other variables. However, similarities also exist among the feet of many different terrestrial vertebrates. The paw of the dog, the hoof of the horse, the manus (foot) and pes (foot) of the elephant, and the foot of the human all share some common features of structure, organization and function. Their foot structures function as the load-transmission platform which is essential to balance, standing and types of locomotion.

Locomotor effects of shoes are the way in which the physical characteristics or components of shoes influence the locomotion neuromechanics of a person. Depending on the characteristics of the shoes, the effects are various, ranging from alteration in balance and posture, muscle activity of different muscles as measured by electromyography (EMG), and the impact force. There are many different types of shoes that exist, such as running, walking, loafers, high heels, sandals, slippers, work boots, dress shoes, and many more. However, a typical shoe will be composed of an insole, midsole, outsole, and heels, if any. In an unshod condition, where one is without any shoes, the locomotor effects are primarily observed in the heel strike patterns and resulting impact forces generated on the ground.
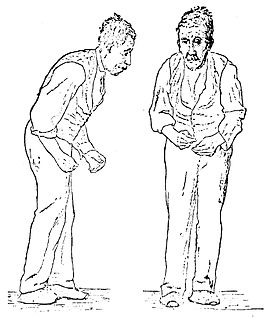
Parkinsonian gait is the type of gait exhibited by patients suffering from Parkinson's disease (PD).. It is often described by people with Parkinson's as feeling like being stuck in place, when initiating a step or turning, and can increase the risk of falling. This disorder is caused by a deficiency of dopamine in the basal ganglia circuit leading to motor deficits. Gait is one of the most affected motor characteristics of this disorder although symptoms of Parkinson's disease are varied.
Terrestrial locomotion by means of a running gait can be accomplished on level surfaces. However, in most outdoor environments an individual will experience terrain undulations requiring uphill running. Similar conditions can be mimicked in a controlled environment on a treadmill also. Additionally, running on inclines is used by runners, both distance and sprinter, to improve cardiovascular conditioning and lower limb strength.

Cutaneous, or skin reflexes, are activated by skin receptors and play a valuable role in locomotion, providing quick responses to unexpected environmental challenges. They have been shown to be important in responses to obstacles or stumbling, in preparing for visually challenging terrain, and for assistance in making adjustments when instability is introduced. In addition to the role in normal locomotion, cutaneous reflexes are being studied for their potential in enhancing rehabilitation therapy (physiotherapy) for people with gait abnormalities.

Gait deviations are nominally referred to as any variation of standard human gait, typically manifesting as a coping mechanism in response to an anatomical impairment. Lower-limb amputees are unable to maintain the characteristic walking patterns of an able-bodied individual due to the removal of some portion of the impaired leg. Without the anatomical structure and neuromechanical control of the removed leg segment, amputees must use alternative compensatory strategies to walk efficiently. Prosthetic limbs provide support to the user and more advanced models attempt to mimic the function of the missing anatomy, including biomechanically controlled ankle and knee joints. However, amputees still display quantifiable differences in many measures of ambulation when compared to able-bodied individuals. Several common observations are whole-body movements, slower and wider steps, shorter strides, and increased sway.
The function of the lower limbs during walking is to support the whole-body against gravitational forces while generating movement patterns which progress the body forward. Walking is an activity that is primarily confined to the sagittal plane, which is also described as the plane of progression. During one gait cycle, there are two major phases: stance and swing. In a healthy individual walking at a normal walking speed, stance phase makes up approximately 60% of one gait cycle and swing makes up the remaining 40%. The lower limbs are only in contact with the ground during stance phase which is typically subdivided into 5 events: heel contact, foot flat, mid-stance, heel off, and toe off. The majority of stance phase (~40%) takes place in single-limb support where one limb is in contact with the ground and the contralateral limb is in swing phase. During this time interval, the lower limb must support constant changes in alignment of body weight while propelling forward. The hip, knee, and ankle joints move through cyclical kinematic patterns that are controlled by muscles which cross these joints. As postural changes occur, the body adapts by motor tuning an efficient muscular pattern that will accomplish the necessary kinematics required to walk.
