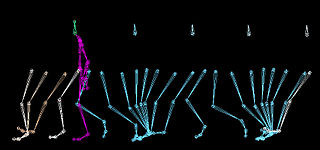
Walking is one of the main gaits of locomotion among legged animals. Walking is typically slower than running and other gaits. Walking is defined by an 'inverted pendulum' gait in which the body vaults over the stiff limb or limbs with each step. This applies regardless of the unusable number of limbs—even arthropods, with six, eight, or more limbs, walk.

A pendulum is a weight suspended from a pivot so that it can swing freely. When a pendulum is displaced sideways from its resting, equilibrium position, it is subject to a restoring force due to gravity that will accelerate it back toward the equilibrium position. When released, the restoring force acting on the pendulum's mass causes it to oscillate about the equilibrium position, swinging back and forth. The time for one complete cycle, a left swing and a right swing, is called the period. The period depends on the length of the pendulum and also to a slight degree on the amplitude, the width of the pendulum's swing.

An electric unicycle is a self-balancing personal transporter with a single wheel. The rider controls the speed by leaning forwards or backwards, and steers by twisting the unit using their feet. The self-balancing mechanism uses gyroscopes and accelerometers in a similar way to that used by the Segway PT.

A power inverter, or inverter, is a power electronic device or circuitry that changes direct current (DC) to alternating current (AC).

Active noise control (ANC), also known as noise cancellation, or active noise reduction (ANR), is a method for reducing unwanted sound by the addition of a second sound specifically designed to cancel the first.
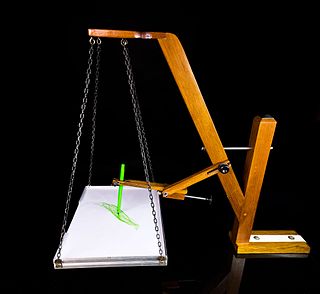
A harmonograph is a mechanical apparatus that employs pendulums to create a geometric image. The drawings created typically are Lissajous curves, or related drawings of greater complexity. The devices, which began to appear in the mid-19th century and peaked in popularity in the 1890s, cannot be conclusively attributed to a single person, although Hugh Blackburn, a professor of mathematics at the University of Glasgow, is commonly believed to be the official inventor.

An escapement is a mechanical linkage in mechanical watches and clocks that gives impulses to the timekeeping element and periodically releases the gear train to move forward, advancing the clock's hands. The impulse action transfers energy to the clock's timekeeping element to replace the energy lost to friction during its cycle and keep the timekeeper oscillating. The escapement is driven by force from a coiled spring or a suspended weight, transmitted through the timepiece's gear train. Each swing of the pendulum or balance wheel releases a tooth of the escapement's escape wheel, allowing the clock's gear train to advance or "escape" by a fixed amount. This regular periodic advancement moves the clock's hands forward at a steady rate. At the same time the tooth gives the timekeeping element a push, before another tooth catches on the escapement's pallet, returning the escapement to its "locked" state. The sudden stopping of the escapement's tooth is what generates the characteristic "ticking" sound heard in operating mechanical clocks and watches. The first mechanical escapement, the verge escapement, was invented in medieval Europe during the 13th century, and was the crucial innovation which lead to the development of the mechanical clock. The design of the escapement has a large effect on a timepiece's accuracy, and improvements in escapement design drove improvements in time measurement during the era of mechanical timekeeping from the 13th through the 19th century.
In physics, complex harmonic motion is a complicated realm based on the simple harmonic motion. The word "complex" refers to different situations. Unlike simple harmonic motion, which is regardless of air resistance, friction, etc., complex harmonic motion often has additional forces to dissipate the initial energy and lessen the speed and amplitude of an oscillation until the energy of the system is totally drained and the system comes to rest at its equilibrium point.

Power electronics is the application of solid-state electronics to the control and conversion of electric power.

A derrick is a lifting device composed at minimum of one guyed mast, as in a gin pole, which may be articulated over a load by adjusting its guys. Most derricks have at least two components, either a guyed mast or self-supporting tower, and a boom hinged at its base to provide articulation, as in a stiffleg derrick.
The term unicycle is often used in robotics and control theory to mean a generalised cart or car moving in a two-dimensional world; these are also often called "unicycle-like" or "unicycle-type" vehicles. This usage is distinct from the literal sense of "one wheeled robot bicycle".

A Ranger is an inverting pendulum ride first manufactured by HUSS Machinenfabrik in 1981. Many of the design elements were later used in the HUSS Rainbow, and the term 'Ranger' has become synonymous with inverting pendulum rides. It was the first inverting swing ride designed since Lee Eyerly's Loop-O-Plane and set the standard for many other attractions using the inverting pendulum ride system, such as the Rainbow, the Kamikaze (ride), and the Inverter.

Pendulum rides are amusement rides based on the motion of a fixed pendulum. The configuration of the ride consists of a gondola, arm, and an axle. One end of the arm is fitted with a passenger-carrying gondola, while the other is attached to the axle. On some models, the arm extends beyond the axle and is fitted with a heavy counterweight. The counterweight is often used when the gondola swings through an inversion. In addition to swinging back and forth, some designs incorporate rotating gondolas and may send riders through a complete inversion. Pendulum rides are propelled by one of two methods: a series of DC motors driving the axle, or wheels at the base of the station pushing the gondola as it swings by.

Standing, also referred to as orthostasis, is a human position in which the body is held in an upright ("orthostatic") position and supported only by the feet. Although seemingly static, the body rocks slightly back and forth from the ankle in the sagittal plane. The sagittal plane bisects the body into right and left sides. The sway of quiet standing is often likened to the motion of an inverted pendulum.

The El Cajón Dam, officially known as Central Hidroeléctrica Francisco Morazán, is a hydroelectric power plant located in Western Honduras. The dam impounds the Comayagua River, which derives its large volume from two large tributaries, the Humuya River and the Sulaco River. El Cajón is a double arch dam, which uses parabolic geometry in horizontal and vertical axises to spread the weight of the impounded water to canyon walls which act as buttresses. Overall, the dam is the fifth highest dam in the Americas and the 16th highest in the world, as well as the highest arch dam in the western hemisphere, and the sixth highest worldwide.



