Related Research Articles
Computational neuroscience is a branch of neuroscience which employs mathematics, computer science, theoretical analysis and abstractions of the brain to understand the principles that govern the development, structure, physiology and cognitive abilities of the nervous system.
Motor control is the regulation of movements in organisms that possess a nervous system. Motor control includes conscious voluntary movements, subconscious muscle memory and involuntary reflexes, as well as instinctual taxis.
David J. Heeger is an American neuroscientist, psychologist, computer scientist, data scientist, and entrepreneur. He is a professor at New York University, Chief Scientific Officer of Statespace Labs, and Chief Scientific Officer and co-founder of Epistemic AI.
Neurorobotics is the combined study of neuroscience, robotics, and artificial intelligence. It is the science and technology of embodied autonomous neural systems. Neural systems include brain-inspired algorithms, computational models of biological neural networks and actual biological systems. Such neural systems can be embodied in machines with mechanic or any other forms of physical actuation. This includes robots, prosthetic or wearable systems but also, at smaller scale, micro-machines and, at the larger scales, furniture and infrastructures.
Bayesian approaches to brain function investigate the capacity of the nervous system to operate in situations of uncertainty in a fashion that is close to the optimal prescribed by Bayesian statistics. This term is used in behavioural sciences and neuroscience and studies associated with this term often strive to explain the brain's cognitive abilities based on statistical principles. It is frequently assumed that the nervous system maintains internal probabilistic models that are updated by neural processing of sensory information using methods approximating those of Bayesian probability.
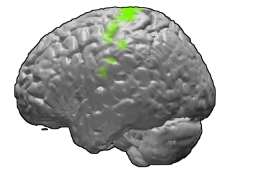
The primary motor cortex is a brain region that in humans is located in the dorsal portion of the frontal lobe. It is the primary region of the motor system and works in association with other motor areas including premotor cortex, the supplementary motor area, posterior parietal cortex, and several subcortical brain regions, to plan and execute voluntary movements. Primary motor cortex is defined anatomically as the region of cortex that contains large neurons known as Betz cells, which, along with other cortical neurons, send long axons down the spinal cord to synapse onto the interneuron circuitry of the spinal cord and also directly onto the alpha motor neurons in the spinal cord which connect to the muscles.
Richard Alan Andersen is an American neuroscientist. He is the James G. Boswell Professor of Neuroscience at the California Institute of Technology in Pasadena, California. His research focuses on visual physiology with an emphasis on translational research to humans in the field of neuroprosthetics, brain-computer interfaces, and cortical repair.
In neuroscience and motor control, the degrees of freedom problem or motor equivalence problem states that there are multiple ways for humans or animals to perform a movement in order to achieve the same goal. In other words, under normal circumstances, no simple one-to-one correspondence exists between a motor problem and a motor solution to the problem. The motor equivalence problem was first formulated by the Russian neurophysiologist Nikolai Bernstein: "It is clear that the basic difficulties for co-ordination consist precisely in the extreme abundance of degrees of freedom, with which the [nervous] centre is not at first in a position to deal."
The neuroscience of rhythm refers to the various forms of rhythm generated by the central nervous system (CNS). Nerve cells, also known as neurons in the human brain are capable of firing in specific patterns which cause oscillations. The brain possesses many different types of oscillators with different periods. Oscillators are simultaneously outputting frequencies from .02 Hz to 600 Hz. It is now well known that a computer is capable of running thousands of processes with just one high-frequency clock. Humans have many different clocks as a result of evolution. Prior organisms had no need for a fast-responding oscillator. This multi-clock system permits quick response to constantly changing sensory input while still maintaining the autonomic processes that sustain life. This method modulates and controls a great deal of bodily functions.
The free energy principle is a theoretical framework suggesting that the brain reduces surprise or uncertainty by making predictions based on internal models and updating them using sensory input. It highlights the brain's objective of aligning its internal model with the external world to enhance prediction accuracy. This principle integrates Bayesian inference with active inference, where actions are guided by predictions and sensory feedback refines them. It has wide-ranging implications for comprehending brain function, perception, and action.
AnimatLab is an open-source neuromechanical simulation tool that allows authors to easily build and test biomechanical models and the neural networks that control them to produce behaviors. Users can construct neural models of varied level of details, 3D mechanical models of triangle meshes, and use muscles, motors, receptive fields, stretch sensors and other transducers to interface the two systems. Experiments can be run in which various stimuli are applied and data is recorded, making it a useful tool for computational neuroscience. The software can also be used to model biomimetic robotic systems.
Rajesh P. N. Rao is the Director of the NSF Center for Neurotechnology (CNT) and the Cherng Jia and Elizabeth Yun Hwang Professor of Computer Science and Engineering and Electrical and Computer Engineering at the University of Washington in Seattle.
Laurence Frederick Abbott is an American theoretical neuroscientist, who is currently the William Bloor Professor of Theoretical Neuroscience at Columbia University, where he helped create the Center for Theoretical Neuroscience. He is widely regarded as one of the leaders of theoretical neuroscience, and is coauthor, along with Peter Dayan, on the first comprehensive textbook on theoretical neuroscience, which is considered to be the standard text for students and researchers entering theoretical neuroscience. He helped invent the dynamic clamp method alongside Eve Marder.

Stephen Harold Scott is a Canadian neuroscientist and engineer who has made significant contributions to the field of sensorimotor neuroscience and the methods of assessing neurological function. He is a professor in both the Department of Biomedical and Molecular Sciences and the Department of Medicine at Queen's University. In 2013, he was named the GlaxoSmithKline-Canadian Institutes of Health Research (GSK-CIHR) Chair in Neurosciences at Queen's. He is the Co-Founder and Chief Scientific Officer of Kinarm, the technology transfer company that commercializes and manufactures his invention the Kinarm.

Robin Angus Silver is Professor of Neuroscience and a Wellcome Trust Principal Research Fellow at University College London. His laboratory studies neurotransmission and artificial neural networks by combining in vitro and in vivo experimental approaches with quantitative analysis and computational models developed in silico.

Reza Shadmehr is an Iranian-American professor of Biomedical Engineering and Neuroscience at the Johns Hopkins School of Medicine. He is known for his contributions to the fields of motor control, motor learning, and computational neuroscience.

Li Zhaoping, born in Shanghai, China, is a neuroscientist at the University of Tübingen in Germany. She is the only woman to win the first place in CUSPEA, an annual national physics competition in China, during CUSPEA's 10-year history (1979–1989). She proposed V1 Saliency Hypothesis (V1SH), and is the author of Understanding vision: theory, models, and data published by Oxford University Press.
Surya Ganguli is a university professor at Stanford University and a visiting research professor at Google. Ganguli is primarily known for his work on neural networks and deep learning, although he has also published papers on theoretical physics. He presently runs the Neural Dynamics and Computation Lab at Stanford, where he aims to reverse engineer how networks of neurons and synapses cooperate across multiple scales of space and time to facilitate sensory perception, motor control, memory, and other cognitive functions. He is also known for being a prolific public speaker and lecturer, having been invited to give over 200 talks at various universities, institutes, workshops, conferences, and symposiums since 2005.

Carsen Stringer is an American computational neuroscientist and Group Leader at the Howard Hughes Medical Institute Janelia Research Campus. Stringer uses machine learning and deep neural networks to visualize large scale neural recordings and then probe the neural computations that give rise to visual processing in mice. Stringer has also developed several novel software packages that enable cell segmentation and robust analyses of neural recordings and mouse behavior.

Eberhard Erich Fetz is an American neuroscientist, academic and researcher. He is a Professor of Physiology and Biophysics and DXARTS at the University of Washington.
References
- ↑ "University of Washington faculty page". washington.edu. University of Washington. 12 June 2009. Retrieved 29 April 2017.
- ↑ Todorov, Emanuel; Erez, Tom; Tassa, Yuval (2012). "MuJoCo: A physics engine for model-based control". 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. International Conference on Intelligent Robots and Systems (IROS). pp. 5026–5033. doi:10.1109/IROS.2012.6386109. ISBN 978-1-4673-1736-8.
- ↑ Studies of Goal-directed Movements (PhD). 1998. hdl:1721.1/9612.
- ↑ "Gatsby Computational Neuroscience Unit". Gatsby.ucl.ac.uk. Retrieved 29 April 2017.
- ↑ "List of past Sloan Fellows". sloan.org. Sloan Foundation. Archived from the original on 14 March 2018. Retrieved 29 April 2017.
- ↑ Todorov, Emanuel; Jordan, Michael I. (2002). "Optimal feedback control as a theory of motor coordination". Nature Neuroscience . 5 (11): 1226–1235. doi:10.1038/nn963. PMID 12404008. S2CID 205441511.
- ↑ Friston, Karl (2011). "What Is Optimal about Motor Control?". Neuron . 72 (3): 488–498. doi: 10.1016/j.neuron.2011.10.018 . PMID 22078508.
- ↑ Angier, Natalie (1 November 2010). "Optimization at the Intersection of Biology and Physics". The New York Times . Retrieved 6 May 2017.
- ↑ Doya, Kenji (2009). "How can we learn efficiently to act optimally and flexibly?". PNAS . 106 (28): 11429–11430. Bibcode:2009PNAS..10611429D. doi: 10.1073/pnas.0905423106 . PMC 2710651 . PMID 19584249.
- ↑ Schmerler, Jessica; Chant, Ian (1 July 2016). "Tomorrow's Prosthetic Hand". Scientific American Mind . Retrieved 6 May 2017.
- ↑ "This Is the Most Amazing Biomimetic Anthropomorphic Robot Hand We've Ever Seen". IEEE Spectrum, Evan Ackerman, 18 Feb 2016
- ↑ "UW team creates robotic hand that learns to become more dexterous than yours". GeekWire, Alan Boyle, May 9, 2016
- ↑ "Robots Podcast : Physics-based Optimization for Robot Control, with Emo Todorov". Irish Tech News, Simon Cocking January 20, 2017.
- ↑ "National Science Foundation grants awarded to Emanuel Todorov". nsf.gov. NSF. Retrieved 29 April 2017.