
The helicoid, also known as helical surface, after the plane and the catenoid, is the third minimal surface to be known.
The helicoid, also known as helical surface, after the plane and the catenoid, is the third minimal surface to be known.
It was described by Euler in 1774 and by Jean Baptiste Meusnier in 1776. Its name derives from its similarity to the helix: for every point on the helicoid, there is a helix contained in the helicoid which passes through that point. Since it is considered that the planar range extends through negative and positive infinity, close observation shows the appearance of two parallel or mirror planes in the sense that if the slope of one plane is traced, the co-plane can be seen to be bypassed or skipped, though in actuality the co-plane is also traced from the opposite perspective.
The helicoid is also a ruled surface (and a right conoid), meaning that it is a trace of a line. Alternatively, for any point on the surface, there is a line on the surface passing through it. Indeed, Catalan proved in 1842 that the helicoid and the plane were the only ruled minimal surfaces. [1]
A helicoid is also a translation surface in the sense of differential geometry.
The helicoid and the catenoid are parts of a family of helicoid-catenoid minimal surfaces.
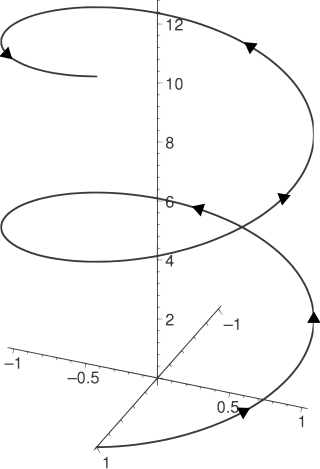
The helicoid is shaped like Archimedes screw, but extends infinitely in all directions. It can be described by the following parametric equations in Cartesian coordinates:
where ρ and θ range from negative infinity to positive infinity, while α is a constant. If α is positive, then the helicoid is right-handed as shown in the figure; if negative then left-handed.
The helicoid has principal curvatures . The sum of these quantities gives the mean curvature (zero since the helicoid is a minimal surface) and the product gives the Gaussian curvature.
The helicoid is homeomorphic to the plane . To see this, let α decrease continuously from its given value down to zero. Each intermediate value of α will describe a different helicoid, until α = 0 is reached and the helicoid becomes a vertical plane.
Conversely, a plane can be turned into a helicoid by choosing a line, or axis, on the plane, then twisting the plane around that axis.
If a helicoid of radius R revolves by an angle of θ around its axis while rising by a height h, the area of the surface is given by [2]
The helicoid and the catenoid are locally isometric surfaces; see Catenoid#Helicoid transformation.

A centripetal force is a force that makes a body follow a curved path. The direction of the centripetal force is always orthogonal to the motion of the body and towards the fixed point of the instantaneous center of curvature of the path. Isaac Newton described it as "a force by which bodies are drawn or impelled, or in any way tend, towards a point as to a centre". In the theory of Newtonian mechanics, gravity provides the centripetal force causing astronomical orbits.
In complex analysis, an entire function, also called an integral function, is a complex-valued function that is holomorphic on the whole complex plane. Typical examples of entire functions are polynomials and the exponential function, and any finite sums, products and compositions of these, such as the trigonometric functions sine and cosine and their hyperbolic counterparts sinh and cosh, as well as derivatives and integrals of entire functions such as the error function. If an entire function has a root at , then , taking the limit value at , is an entire function. On the other hand, the natural logarithm, the reciprocal function, and the square root are all not entire functions, nor can they be continued analytically to an entire function.

A sphere is a geometrical object that is a three-dimensional analogue to a two-dimensional circle. Formally, a sphere is the set of points that are all at the same distance r from a given point in three-dimensional space. That given point is the centre of the sphere, and r is the sphere's radius. The earliest known mentions of spheres appear in the work of the ancient Greek mathematicians.

An ellipsoid is a surface that can be obtained from a sphere by deforming it by means of directional scalings, or more generally, of an affine transformation.
A helix is a shape like a corkscrew or spiral staircase. It is a type of smooth space curve with tangent lines at a constant angle to a fixed axis. Helices are important in biology, as the DNA molecule is formed as two intertwined helices, and many proteins have helical substructures, known as alpha helices. The word helix comes from the Greek word ἕλιξ, "twisted, curved". A "filled-in" helix – for example, a "spiral" (helical) ramp – is a surface called helicoid.

In geometry, a catenoid is a type of surface, arising by rotating a catenary curve about an axis. It is a minimal surface, meaning that it occupies the least area when bounded by a closed space. It was formally described in 1744 by the mathematician Leonhard Euler.
In mathematics and physics, n-dimensional anti-de Sitter space (AdSn) is a maximally symmetric Lorentzian manifold with constant negative scalar curvature. Anti-de Sitter space and de Sitter space are named after Willem de Sitter (1872–1934), professor of astronomy at Leiden University and director of the Leiden Observatory. Willem de Sitter and Albert Einstein worked together closely in Leiden in the 1920s on the spacetime structure of the universe.

A surface of revolution is a surface in Euclidean space created by rotating a curve one full revolution around an axis of rotation.

In physics and astronomy, the Reissner–Nordström metric is a static solution to the Einstein–Maxwell field equations, which corresponds to the gravitational field of a charged, non-rotating, spherically symmetric body of mass M. The analogous solution for a charged, rotating body is given by the Kerr–Newman metric.

Projectile motion is a form of motion experienced by an object or particle that is projected in a gravitational field, such as from Earth's surface, and moves along a curved path under the action of gravity only. In the particular case of projectile motion on Earth, most calculations assume the effects of air resistance are passive and negligible. The curved path of objects in projectile motion was shown by Galileo to be a parabola, but may also be a straight line in the special case when it is thrown directly upward or downward. The study of such motions is called ballistics, and such a trajectory is a ballistic trajectory. The only force of mathematical significance that is actively exerted on the object is gravity, which acts downward, thus imparting to the object a downward acceleration towards the Earth’s center of mass. Because of the object's inertia, no external force is needed to maintain the horizontal velocity component of the object's motion. Taking other forces into account, such as aerodynamic drag or internal propulsion, requires additional analysis. A ballistic missile is a missile only guided during the relatively brief initial powered phase of flight, and whose remaining course is governed by the laws of classical mechanics.

In mathematics, Watt's curve is a tricircular plane algebraic curve of degree six. It is generated by two circles of radius b with centers distance 2a apart. A line segment of length 2c attaches to a point on each of the circles, and the midpoint of the line segment traces out the Watt curve as the circles rotate partially back and forth or completely around. It arose in connection with James Watt's pioneering work on the steam engine.
The method of image charges is a basic problem-solving tool in electrostatics. The name originates from the replacement of certain elements in the original layout with imaginary charges, which replicates the boundary conditions of the problem.

In mathematics, a Scherk surface is an example of a minimal surface. Scherk described two complete embedded minimal surfaces in 1834; his first surface is a doubly periodic surface, his second surface is singly periodic. They were the third non-trivial examples of minimal surfaces. The two surfaces are conjugates of each other.
A ratio distribution is a probability distribution constructed as the distribution of the ratio of random variables having two other known distributions. Given two random variables X and Y, the distribution of the random variable Z that is formed as the ratio Z = X/Y is a ratio distribution.

In general relativity, a point mass deflects a light ray with impact parameter by an angle approximately equal to
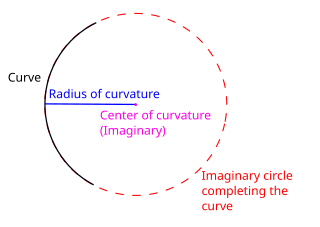
In differential geometry, the radius of curvature (Rc), R, is the reciprocal of the curvature. For a curve, it equals the radius of the circular arc which best approximates the curve at that point. For surfaces, the radius of curvature is the radius of a circle that best fits a normal section or combinations thereof.

Isentropic expansion waves are created when a supersonic flow is redirected along a curved surface. These waves are studied to obtain a relation between deflection angle and Mach number. Each wave in this case is a Mach wave, so it is at an angle , where M is the Mach number immediately before the wave. Expansion waves are divergent because as the flow expands the value of Mach number increases, thereby decreasing the Mach angle.
In Einstein's theory of general relativity, the interior Schwarzschild metric is an exact solution for the gravitational field in the interior of a non-rotating spherical body which consists of an incompressible fluid and has zero pressure at the surface. This is a static solution, meaning that it does not change over time. It was discovered by Karl Schwarzschild in 1916, who earlier had found the exterior Schwarzschild metric.
In fluid dynamics, Landau–Squire jet or Submerged Landau jet describes a round submerged jet issued from a point source of momentum into an infinite fluid medium of the same kind. This is an exact solution to the incompressible form of the Navier-Stokes equations, which was first discovered by Lev Landau in 1944 and later by Herbert Squire in 1951. The self-similar equation was in fact first derived by N. A. Slezkin in 1934, but never applied to the jet. Following Landau's work, V. I. Yatseyev obtained the general solution of the equation in 1950.
The Bigoni–Piccolroaz yield criterion is a yielding model, based on a phenomenological approach, capable of describing the mechanical behavior of a broad class of pressure-sensitive granular materials such as soil, concrete, porous metals and ceramics.






