Related Research Articles

Gait analysis is the systematic study of animal locomotion, more specifically the study of human motion, using the eye and the brain of observers, augmented by instrumentation for measuring body movements, body mechanics, and the activity of the muscles. Gait analysis is used to assess and treat individuals with conditions affecting their ability to walk. It is also commonly used in sports biomechanics to help athletes run more efficiently and to identify posture-related or movement-related problems in people with injuries.

In computer animation and robotics, inverse kinematics is the mathematical process of calculating the variable joint parameters needed to place the end of a kinematic chain, such as a robot manipulator or animation character's skeleton, in a given position and orientation relative to the start of the chain. Given joint parameters, the position and orientation of the chain's end, e.g. the hand of the character or robot, can typically be calculated directly using multiple applications of trigonometric formulas, a process known as forward kinematics. However, the reverse operation is, in general, much more challenging.

A gait is a manner of limb movements made during locomotion. Human gaits are the various ways in which humans can move, either naturally or as a result of specialized training. Human gait is defined as bipedal forward propulsion of the center of gravity of the human body, in which there are sinuous movements of different segments of the body with little energy spent. Varied gaits are characterized by differences such as limb movement patterns, overall velocity, forces, kinetic and potential energy cycles, and changes in contact with the ground.

In robotics, robot kinematics applies geometry to the study of the movement of multi-degree of freedom kinematic chains that form the structure of robotic systems. The emphasis on geometry means that the links of the robot are modeled as rigid bodies and its joints are assumed to provide pure rotation or translation.
In classical mechanics, the Newton–Euler equations describe the combined translational and rotational dynamics of a rigid body.
In physiology, motor coordination is the orchestrated movement of multiple body parts as required to accomplish intended actions, like walking. This coordination is achieved by adjusting kinematic and kinetic parameters associated with each body part involved in the intended movement. The modifications of these parameters typically relies on sensory feedback from one or more sensory modalities, such as proprioception and vision.
Multibody system is the study of the dynamic behavior of interconnected rigid or flexible bodies, each of which may undergo large translational and rotational displacements.

Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots. Robotics is related to the sciences of electronics, engineering, mechanics, and software.

Undulatory locomotion is the type of motion characterized by wave-like movement patterns that act to propel an animal forward. Examples of this type of gait include crawling in snakes, or swimming in the lamprey. Although this is typically the type of gait utilized by limbless animals, some creatures with limbs, such as the salamander, forgo use of their legs in certain environments and exhibit undulatory locomotion. In robotics this movement strategy is studied in order to create novel robotic devices capable of traversing a variety of environments.
Sports biomechanics is a quantitative based study and analysis of professional athletes and sports activities in general. It can simply be described as the physics of sports. In this subfield of biomechanics the laws of mechanics are applied in order to gain a greater understanding of athletic performance through mathematical modeling, computer simulation and measurement. Biomechanics is the study of the structure and function of biological systems by means of the methods of mechanics. Within mechanics there are two sub-fields of study: statics, which is the study of systems that are in a state of constant motion either at rest or moving with a constant velocity; and dynamics, which is the study of systems in motion in which acceleration is present, which may involve kinematics and kinetics. Sports biomechanists help people obtain optimal muscle recruitment and performance. A biomechanist also uses their knowledge to apply proper load barring techniques to preserve the body.
Terrestrial locomotion by means of a running gait can be accomplished on level surfaces. However, in most outdoor environments an individual will experience terrain undulations requiring uphill running. Similar conditions can be mimicked in a controlled environment on a treadmill also. Additionally, running on inclines is used by runners, both distance and sprinter, to improve cardiovascular conditioning and lower limb strength.

Arm swing in human bipedal walking is a natural motion wherein each arm swings with the motion of the opposing leg. Swinging arms in an opposing direction with respect to the lower limb reduces the angular momentum of the body, balancing the rotational motion produced during walking. Although such pendulum-like motion of arms is not essential for walking, recent studies point that arm swing improves the stability and energy efficiency in human locomotion. Those positive effects of arm swing have been utilized in sports, especially in racewalking and sprinting.
Neuromechanics of orthoses refers to how the human body interacts with orthoses. Millions of people in the U.S. suffer from stroke, multiple sclerosis, postpolio, spinal cord injuries, or various other ailments that benefit from the use of orthoses. Insofar as active orthoses and powered exoskeletons are concerned, the technology to build these devices is improving rapidly, but little research has been done on the human side of these human-machine interfaces.
As humans move through their environment, they must change the stiffness of their joints in order to effectively interact with their surroundings. Stiffness is the degree to a which an object resists deformation when subjected to a known force. This idea is also referred to as impedance, however, sometimes the idea of deformation under a given load is discussed under the term "compliance" which is the opposite of stiffness . In order to effectively interact with their environment, humans must adjust the stiffness of their limbs. This is accomplished via the co-contraction of antagonistic muscle groups.
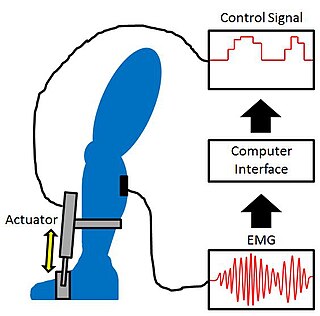
Proportional myoelectric control can be used to activate robotic lower limb exoskeletons. A proportional myoelectric control system utilizes a microcontroller or computer that inputs electromyography (EMG) signals from sensors on the leg muscle(s) and then activates the corresponding joint actuator(s) proportionally to the EMG signal.
Robotic prosthesis control is a method for controlling a prosthesis in such a way that the controlled robotic prosthesis restores a biologically accurate gait to a person with a loss of limb. This is a special branch of control that has an emphasis on the interaction between humans and robotics.
The function of the lower limbs during walking is to support the whole-body against gravitational forces while generating movement patterns which progress the body forward. Walking is an activity that is primarily confined to the sagittal plane, which is also described as the plane of progression. During one gait cycle, there are two major phases: stance and swing. In a healthy individual walking at a normal walking speed, stance phase makes up approximately 60% of one gait cycle and swing makes up the remaining 40%. The lower limbs are only in contact with the ground during the stance phase, which is typically subdivided into 5 events: heel contact, foot flat, mid-stance, heel off, and toe off. The majority of stance phase (~40%) takes place in single-limb support where one limb is in contact with the ground and the contralateral limb is in swing phase. During this time interval, the lower limb must support constant changes in alignment of body weight while propelling forward. The hip, knee, and ankle joints move through cyclical kinematic patterns that are controlled by muscles which cross these joints. As postural changes occur, the body adapts by motor tuning an efficient muscular pattern that will accomplish the necessary kinematics required to walk.
Inverse dynamics-based static optimization is a method for estimating muscle-tendon forces from the measured kinematics of a given body part. It exploits the concepts of inverse dynamics and static optimization. Joint moments are obtained by inverse dynamics and then, knowing muscular moment arms, a static optimization process is carried on to evaluate optimal single-muscle forces for the system

In kinematics, a five-bar linkage is a mechanism with two degrees of freedom that is constructed from five links that are connected together in a closed chain. All links are connected to each other by five joints in series forming a loop. One of the links is the ground or base. This configuration is also called a pantograph, however, it is not to be confused with the parallelogram-copying linkage pantograph.
The study of animal locomotion is a branch of biology that investigates and quantifies how animals move.
References
- ↑ Crowninshield, R. D., Johnston, R. C., Andrews, J. G., & Brand, R. A. (1978). "A biomechanical investigation of the human hip". Journal of Biomechanics. 11 (1): 75–85. doi:10.1016/0021-9290(78)90045-3. PMID 659458.
{{cite journal}}: CS1 maint: multiple names: authors list (link) - 1 2 3 Robertson DGE, et al., Research Methods in Biomechanics, Champaign IL:Human Kinetics Pubs., 2004.
- 1 2 Winter, D.A. (1991). The biomechanics and motor control of human gait: normal, elderly and pathological. Waterloo, Ontario: University of Waterloo Press.
- ↑ Lamb, John (25 August 1988). "Mathematics frees robots for finer tasks". New Scientist. Retrieved 7 June 2023.
- ↑ Bayo, Eduardo (February 1987). "A finite-element approach to control the end-point motion of a single-link flexible robot". Journal of Robotic Systems. Wiley. 4 (1): 63–75. doi:10.1002/rob.4620040106 . Retrieved 7 June 2023.
- Kirtley, C.; Whittle, M.W; Jefferson, RJ (1985). "Influence of Walking Speed on Gait Parameters". Journal of Biomedical Engineering. 7 (4): 282–8. doi:10.1016/0141-5425(85)90055-X. PMID 4057987.
- Jensen RK (1989). "Changes in segment inertia proportions between four and twenty years". Journal of Biomechanics. 22 (6–7): 529–36. doi:10.1016/0021-9290(89)90004-3. PMID 2808438.