External links
| | This science article is a stub. You can help Wikipedia by expanding it. |
In a dynamical system, multistability is the property of having multiple stable equilibrium points in the vector space spanned by the states in the system. By mathematical necessity, there must also be unstable equilibrium points between the stable points. Points that are stable in some dimensions and unstable in others are termed unstable, as is the case with the first three Lagrangian points.
Bistability is the special case with two stable equilibrium points. It is the simplest form of multistability, and can occur in systems with only one state variable, as it only takes a one-dimensional space to separate two points.
Near an unstable equilibrium, any system will be sensitive to noise, initial conditions and system parameters, which can cause it to develop in one of multiple divergent directions. In economics and social sciences, path dependence gives rise to divergent directions of development. Some path dependent processes are adequately described by multistability, by being initially sensitive to input, before reaching a stagnant state – for example market share instability, which can develop into a stable monopoly for one of multiple possible vendors.
| | This science article is a stub. You can help Wikipedia by expanding it. |

In a dynamical system, bistability means the system has two stable equilibrium states. Something that is bistable can be resting in either of two states. An example of a mechanical device which is bistable is a light switch. The switch lever is designed to rest in the "on" or "off" position, but not between the two. Bistable behavior can occur in mechanical linkages, electronic circuits, nonlinear optical systems, chemical reactions, and physiological and biological systems.
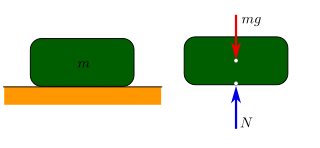
In classical mechanics, a particle is in mechanical equilibrium if the net force on that particle is zero. By extension, a physical system made up of many parts is in mechanical equilibrium if the net force on each of its individual parts is zero.
In the mathematical field of dynamical systems, an attractor is a set of states toward which a system tends to evolve, for a wide variety of starting conditions of the system. System values that get close enough to the attractor values remain close even if slightly disturbed.

In dynamical system theory, a phase space is a space in which all possible states of a system are represented, with each possible state corresponding to one unique point in the phase space. For mechanical systems, the phase space usually consists of all possible values of position and momentum variables. It is the outer product of direct space and reciprocal space. The concept of phase space was developed in the late 19th century by Ludwig Boltzmann, Henri Poincaré, and Josiah Willard Gibbs.

The Interplanetary Transport Network (ITN) is a collection of gravitationally determined pathways through the Solar System that require very little energy for an object to follow. The ITN makes particular use of Lagrange points as locations where trajectories through space can be redirected using little or no energy. These points have the peculiar property of allowing objects to orbit around them, despite lacking an object to orbit. While it would use little energy, transport along the network would take a long time.

In the thermodynamics of equilibrium, a state function, function of state, or point function for a thermodynamic system is a mathematical function relating several state variables or state quantities that depend only on the current equilibrium thermodynamic state of the system, not the path which the system has taken to reach that state. A state function describes equilibrium states of a system, thus also describing the type of system. A state variable is typically a state function so the determination of other state variable values at an equilibrium state also determines the value of the state variable as the state function at that state. The ideal gas law is a good example. In this law, one state variable is a function of other state variables so is regarded as a state function. A state function could also describe the number of a certain type of atoms or molecules in a gaseous, liquid, or solid form in a heterogeneous or homogeneous mixture, or the amount of energy required to create such a system or change the system into a different equilibrium state.
In mathematics, catastrophe theory is a branch of bifurcation theory in the study of dynamical systems; it is also a particular special case of more general singularity theory in geometry.
Non-equilibrium thermodynamics is a branch of thermodynamics that deals with physical systems that are not in thermodynamic equilibrium but can be described in terms of macroscopic quantities that represent an extrapolation of the variables used to specify the system in thermodynamic equilibrium. Non-equilibrium thermodynamics is concerned with transport processes and with the rates of chemical reactions.

Earnshaw's theorem states that a collection of point charges cannot be maintained in a stable stationary equilibrium configuration solely by the electrostatic interaction of the charges. This was first proven by British mathematician Samuel Earnshaw in 1842. It is usually referenced to magnetic fields, but was first applied to electrostatic fields.

An optical cavity, resonating cavity or optical resonator is an arrangement of mirrors or other optical elements that forms a cavity resonator for light waves. Optical cavities are a major component of lasers, surrounding the gain medium and providing feedback of the laser light. They are also used in optical parametric oscillators and some interferometers. Light confined in the cavity reflects multiple times, producing modes with certain resonance frequencies. Modes can be decomposed into longitudinal modes that differ only in frequency and transverse modes that have different intensity patterns across the cross-section of the beam. Many types of optical cavity produce standing wave modes.
In systems theory, a system or a process is in a steady state if the variables which define the behavior of the system or the process are unchanging in time. In continuous time, this means that for those properties p of the system, the partial derivative with respect to time is zero and remains so:
In mathematics, geometric invariant theory is a method for constructing quotients by group actions in algebraic geometry, used to construct moduli spaces. It was developed by David Mumford in 1965, using ideas from the paper in classical invariant theory.
Classical thermodynamics considers three main kinds of thermodynamic process: (1) changes in a system, (2) cycles in a system, and (3) flow processes.
In the mathematics of evolving systems, the concept of a center manifold was originally developed to determine stability of degenerate equilibria. Subsequently, the concept of center manifolds was realised to be fundamental to mathematical modelling.

In mathematics, a homoclinic orbit is a trajectory of a flow of a dynamical system which joins a saddle equilibrium point to itself. More precisely, a homoclinic orbit lies in the intersection of the stable manifold and the unstable manifold of an equilibrium.

In mathematics, stability theory addresses the stability of solutions of differential equations and of trajectories of dynamical systems under small perturbations of initial conditions. The heat equation, for example, is a stable partial differential equation because small perturbations of initial data lead to small variations in temperature at a later time as a result of the maximum principle. In partial differential equations one may measure the distances between functions using Lp norms or the sup norm, while in differential geometry one may measure the distance between spaces using the Gromov–Hausdorff distance.

The Gömböc is the first known physical example of a class of convex three-dimensional homogeneous bodies, called mono-monostatic, which, when resting on a flat surface have just one stable and one unstable point of equilibrium. The existence of this class was conjectured by the Russian mathematician Vladimir Arnold in 1995 and proven in 2006 by the Hungarian scientists Gábor Domokos and Péter Várkonyi by constructing at first a mathematical example and subsequently a physical example. Mono-monostatic shapes exist in countless varieties, most of which are close to a sphere, with a stringent shape tolerance.
In the bifurcation theory, a bounded oscillation that is born without loss of stability of stationary set is called a hidden oscillation. In nonlinear control theory, the birth of a hidden oscillation in a time-invariant control system with bounded states means crossing a boundary, in the domain of the parameters, where local stability of the stationary states implies global stability. If a hidden oscillation attracts all nearby oscillations, then it is called a hidden attractor. For a dynamical system with a unique equilibrium point that is globally attractive, the birth of a hidden attractor corresponds to a qualitative change in behaviour from monostability to bi-stability. In the general case, a dynamical system may turn out to be multistable and have coexisting local attractors in the phase space. While trivial attractors, i.e. stable equilibrium points, can be easily found analytically or numerically, the search of periodic and chaotic attractors can turn out to be a challenging problem.
Biological applications of bifurcation theory provide a framework for understanding the behavior of biological networks modeled as dynamical systems. In the context of a biological system, bifurcation theory describes how small changes in an input parameter can cause a bifurcation or qualitative change in the behavior of the system. The ability to make dramatic change in system output is often essential to organism function, and bifurcations are therefore ubiquitous in biological networks such as the switches of the cell cycle.

Heteroclinic channels are ensembles of trajectories that can connect saddle equilibrium points in phase space. Dynamical systems and their associated phase spaces can be used to describe natural phenomena in mathematical terms; heteroclinic channels, and the cycles that they produce, are features in phase space that can be designed to occupy specific locations in that space. Heteroclinic channels move trajectories from one equilibrium point to another. More formally, a heteroclinic channel is a region in phase space in which nearby trajectories are drawn closer and closer to one unique limiting trajectory, the heteroclinic orbit. Equilibria connected by heteroclinic trajectories form heteroclinic cycles and cycles can be connected to form heteroclinic networks. Heteroclinic cycles and networks naturally appear in a number of applications, such as fluid dynamics, population dynamics, and neural dynamics. In addition, dynamical systems are often used as methods for robotic control. In particular, for robotic control, the equilibrium points can correspond to robotic states, and the heteroclinic channels can provide smooth methods for switching from state to state.