Related Research Articles

In graph theory, a tree is an undirected graph in which any two vertices are connected by exactly one path, or equivalently a connected acyclic undirected graph. A forest is an undirected graph in which any two vertices are connected by at most one path, or equivalently an acyclic undirected graph, or equivalently a disjoint union of trees.

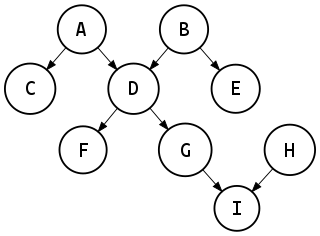
In mathematics, particularly graph theory, and computer science, a directed acyclic graph (DAG) is a directed graph with no directed cycles. That is, it consists of vertices and edges, with each edge directed from one vertex to another, such that following those directions will never form a closed loop. A directed graph is a DAG if and only if it can be topologically ordered, by arranging the vertices as a linear ordering that is consistent with all edge directions. DAGs have numerous scientific and computational applications, ranging from biology to information science to computation (scheduling).

In the mathematical field of graph theory, a Hamiltonian path is a path in an undirected or directed graph that visits each vertex exactly once. A Hamiltonian cycle is a cycle that visits each vertex exactly once. A Hamiltonian path that starts and ends at adjacent vertices can be completed by adding one more edge to form a Hamiltonian cycle, and removing any edge from a Hamiltonian cycle produces a Hamiltonian path. The computational problems of determining whether such paths and cycles exist in graphs are NP-complete; see Hamiltonian path problem for details.
This is a glossary of graph theory. Graph theory is the study of graphs, systems of nodes or vertices connected in pairs by lines or edges.

In discrete mathematics, and more specifically in graph theory, a graph is a structure amounting to a set of objects in which some pairs of the objects are in some sense "related". The objects are represented by abstractions called vertices and each of the related pairs of vertices is called an edge. Typically, a graph is depicted in diagrammatic form as a set of dots or circles for the vertices, joined by lines or curves for the edges.
In graph theory, an Eulerian trail is a trail in a finite graph that visits every edge exactly once. Similarly, an Eulerian circuit or Eulerian cycle is an Eulerian trail that starts and ends on the same vertex. They were first discussed by Leonhard Euler while solving the famous Seven Bridges of Königsberg problem in 1736. The problem can be stated mathematically like this:
In graph theory, an undirected graph H is called a minor of the graph G if H can be formed from G by deleting edges, vertices and by contracting edges.

In the mathematical theory of directed graphs, a graph is said to be strongly connected if every vertex is reachable from every other vertex. The strongly connected components of a directed graph form a partition into subgraphs that are themselves strongly connected. It is possible to test the strong connectivity of a graph, or to find its strongly connected components, in linear time (that is, Θ(V + E )).
In mathematics, and more specifically in graph theory, a polytree is a directed acyclic graph whose underlying undirected graph is a tree. In other words, if we replace its directed edges with undirected edges, we obtain an undirected graph that is both connected and acyclic.

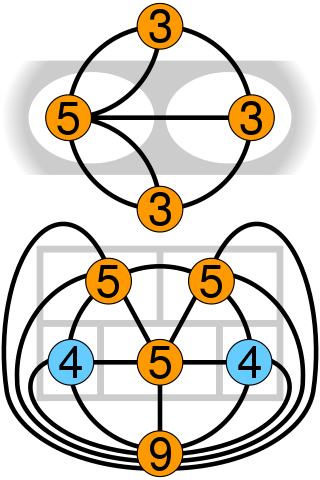
In the mathematical discipline of graph theory, the dual graph of a planar graph G is a graph that has a vertex for each face of G. The dual graph has an edge for each pair of faces in G that are separated from each other by an edge, and a self-loop when the same face appears on both sides of an edge. Thus, each edge e of G has a corresponding dual edge, whose endpoints are the dual vertices corresponding to the faces on either side of e. The definition of the dual depends on the choice of embedding of the graph G, so it is a property of plane graphs rather than planar graphs. For planar graphs generally, there may be multiple dual graphs, depending on the choice of planar embedding of the graph.
In graph theory, a comparability graph is an undirected graph that connects pairs of elements that are comparable to each other in a partial order. Comparability graphs have also been called transitively orientable graphs, partially orderable graphs, containment graphs, and divisor graphs. An incomparability graph is an undirected graph that connects pairs of elements that are not comparable to each other in a partial order.
In graph theory, a strong orientation of an undirected graph is an assignment of a direction to each edge that makes it into a strongly connected graph.

In mathematics, and more specifically in graph theory, a directed graph is a graph that is made up of a set of vertices connected by directed edges, often called arcs.
In graph theory, a Trémaux tree of an undirected graph is a type of spanning tree, generalizing depth-first search trees. They are defined by the property that every edge of connects an ancestor–descendant pair in the tree. Trémaux trees are named after Charles Pierre Trémaux, a 19th-century French author who used a form of depth-first search as a strategy for solving mazes. They have also been called normal spanning trees, especially in the context of infinite graphs.

In graph theory, an acyclic orientation of an undirected graph is an assignment of a direction to each edge that does not form any directed cycle and therefore makes it into a directed acyclic graph. Every graph has an acyclic orientation.
In graph theory, the Gallai–Hasse–Roy–Vitaver theorem is a form of duality between the colorings of the vertices of a given undirected graph and the orientations of its edges. It states that the minimum number of colors needed to properly color any graph equals one plus the length of a longest path in an orientation of chosen to minimize this path's length. The orientations for which the longest path has minimum length always include at least one acyclic orientation.
In graph theory, Robbins' theorem, named after Herbert Robbins, states that the graphs that have strong orientations are exactly the 2-edge-connected graphs. That is, it is possible to choose a direction for each edge of an undirected graph G, turning it into a directed graph that has a path from every vertex to every other vertex, if and only if G is connected and has no bridge.
In graph theory, a bipolar orientation or st-orientation of an undirected graph is an assignment of a direction to each edge that causes the graph to become a directed acyclic graph with a single source s and a single sink t, and an st-numbering of the graph is a topological ordering of the resulting directed acyclic graph.

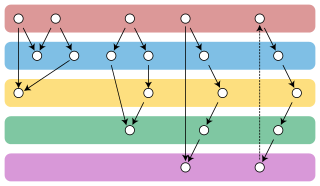
In graph drawing, an upward planar drawing of a directed acyclic graph is an embedding of the graph into the Euclidean plane, in which the edges are represented as non-crossing monotonic upwards curves. That is, the curve representing each edge should have the property that every horizontal line intersects it in at most one point, and no two edges may intersect except at a shared endpoint. In this sense, it is the ideal case for layered graph drawing, a style of graph drawing in which edges are monotonic curves that may cross, but in which crossings are to be minimized.
In graph theory, a Pfaffian orientation of an undirected graph assigns a direction to each edge, so that certain cycles have an odd number of edges in each direction. When a graph has a Pfaffian orientation, the orientation can be used to count the perfect matchings of the graph. This is the main idea behind the FKT algorithm for counting perfect matchings in planar graphs, which always have Pfaffian orientations. More generally, every graph that does not have the utility graph as a graph minor has a Pfaffian orientation, but does not, nor do infinitely many other minimal non-Pfaffian graphs.
References
- ↑ Diestel, Reinhard (2005), "1.10 Other notions of graphs", Graph Theory (PDF) (3rd ed.), Springer, ISBN 978-3-540-26182-7 .
- ↑ Rebane, George; Pearl, Judea (1987), "The recovery of causal poly-trees from statistical data", Proc. 3rd Annual Conference on Uncertainty in Artificial Intelligence (UAI 1987), Seattle, WA, USA, July 1987, pp. 222–228, arXiv: 1304.2736 .
- ↑ Sumner's Universal Tournament Conjecture, Douglas B. West, retrieved 2012-08-02.
- ↑ Harary, Frank; Palmer, Edgar M. (1973), "Formula 5.4.13", Graphical Enumeration, New York: Academic Press, p. 133, MR 0357214 .
- ↑ Robbins, H. E. (1939), "A theorem on graphs, with an application to a problem of traffic control", The American Mathematical Monthly , 46 (5): 281–283, doi:10.2307/2303897, hdl: 10338.dmlcz/101517 , JSTOR 2303897 .
- ↑ Nešetřil, Jaroslav; Ossona de Mendez, Patrice (2012), "Theorem 3.13", Sparsity: Graphs, Structures, and Algorithms, Algorithms and Combinatorics, vol. 28, Heidelberg: Springer, p. 42, doi:10.1007/978-3-642-27875-4, ISBN 978-3-642-27874-7, MR 2920058 .
- ↑ de Fraysseix, Hubert; Ossona de Mendez, Patrice; Rosenstiehl, Pierre (1995), "Bipolar orientations revisited", Discrete Applied Mathematics, 56 (2–3): 157–179, doi: 10.1016/0166-218X(94)00085-R , MR 1318743 .
- ↑ Ghouila-Houri, Alain (1962), "Caractérisation des graphes non orientés dont on peut orienter les arrêtes de manière à obtenir le graphe d'une relation d'ordre", Les Comptes rendus de l'Académie des sciences , 254: 1370–1371, MR 0172275 .
- ↑ McConnell, R. M.; Spinrad, J. (1997), "Linear-time transitive orientation", 8th ACM-SIAM Symposium on Discrete Algorithms, pp. 19–25.
- ↑ Mihail, M.; Winkler, P. (1996), "On the number of Eulerian orientations of a graph", Algorithmica , 16 (4–5): 402–414, doi:10.1007/s004539900057, MR 1407581 .
- ↑ Thomas, Robin (2006), "A survey of Pfaffian orientations of graphs" (PDF), International Congress of Mathematicians. Vol. III, Eur. Math. Soc., Zürich, pp. 963–984, doi:10.4171/022-3/47, ISBN 978-3-03719-022-7, MR 2275714