Related Research Articles

An aircraft is a vehicle that is able to fly by gaining support from the air. It counters the force of gravity by using either static lift or the dynamic lift of an airfoil, or, in a few cases, direct downward thrust from its engines. Common examples of aircraft include airplanes, helicopters, airships, gliders, paramotors, and hot air balloons.

Fly-by-wire (FBW) is a system that replaces the conventional manual flight controls of an aircraft with an electronic interface. The movements of flight controls are converted to electronic signals transmitted by wires, and flight control computers determine how to move the actuators at each control surface to provide the ordered response. It can use mechanical flight control backup systems or use fully fly-by-wire controls.

An autogyro, or gyroplane, is a type of rotorcraft that uses an unpowered rotor in free autorotation to develop lift. While similar to a helicopter rotor in appearance, the autogyro's unpowered rotor disc must have air flowing upward across it to make it rotate.

A tiltrotor is an aircraft that generates lift and propulsion by way of one or more powered rotors mounted on rotating shafts or nacelles usually at the ends of a fixed wing. Almost all tiltrotors use a transverse rotor design, with a few exceptions that use other multirotor layouts.

The attitude indicator (AI), formerly known as the gyro horizon or artificial horizon, is a flight instrument that informs the pilot of the aircraft orientation relative to Earth's horizon, and gives an immediate indication of the smallest orientation change. The miniature aircraft and horizon bar mimic the relationship of the aircraft relative to the actual horizon. It is a primary instrument for flight in instrument meteorological conditions.

An autopilot is a system used to control the path of an aircraft, marine craft or spacecraft without requiring constant manual control by a human operator. Autopilots do not replace human operators. Instead, the autopilot assists the operator's control of the vehicle, allowing the operator to focus on broader aspects of operations.

Aircraft flight control surfaces are aerodynamic devices allowing a pilot to adjust and control the aircraft's flight attitude.
In aviation, an aircraft is said to have relaxed stability if it has low or negative stability.
The CarterCopter is an experimental compound autogyro developed by Carter Aviation Technologies in the United States to demonstrate slowed rotor technology. On 17 June 2005, the CarterCopter became the first rotorcraft to achieve mu-1 (μ=1), an equal ratio of airspeed to rotor tip speed, but crashed on the next flight and has been inoperable since. It is being replaced by the Carter Personal Air Vehicle.

The AgustaWestlandAW609, formerly the Bell/Agusta BA609, is a twin-engined tiltrotor VTOL aircraft with a configuration similar to that of the Bell Boeing V-22 Osprey. It is capable of landing vertically like a helicopter while having a range and speed in excess of conventional rotorcraft. The AW609 is aimed at the civil aviation market, in particular VIP customers and offshore oil and gas operators.
Retreating blade stall is a hazardous flight condition in helicopters and other rotary wing aircraft, where the retreating rotor blade has a lower relative blade speed, combined with an increased angle of attack, causing a stall and loss of lift. Retreating blade stall is the primary limiting factor of a helicopter's never exceed speed, VNE.

The vortex ring state (VRS) is a dangerous aerodynamic condition that may arise in helicopter flight, when a vortex ring system engulfs the rotor, causing severe loss of lift. Often the term settling with power is used as a synonym, e.g., in Australia, the UK, and the USA, but not in Canada, which uses the latter term for a different phenomenon.

A motion simulator or motion platform is a mechanism that creates the feelings of being in a real motion environment. In a simulator, the movement is synchronised with a visual display of the outside world (OTW) scene. Motion platforms can provide movement in all of the six degrees of freedom (DOF) that can be experienced by an object that is free to move, such as an aircraft or spacecraft:. These are the three rotational degrees of freedom and three translational or linear degrees of freedom.
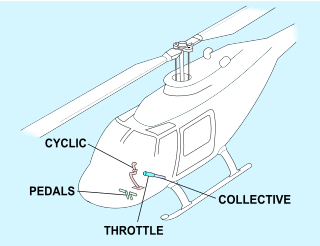
A helicopter pilot manipulates the helicopter flight controls to achieve and maintain controlled aerodynamic flight. Changes to the aircraft flight control system transmit mechanically to the rotor, producing aerodynamic effects on the rotor blades that make the helicopter move in a deliberate way. To tilt forward and back (pitch) or sideways (roll) requires that the controls alter the angle of attack of the main rotor blades cyclically during rotation, creating differing amounts of lift (force) at different points in the cycle. To increase or decrease overall lift requires that the controls alter the angle of attack for all blades collectively by equal amounts at the same time, resulting in ascent, descent, acceleration and deceleration.

The Canadair CL-84 "Dynavert", designated by the Canadian Forces as the CX-131, was a V/STOL turbine tiltwing monoplane designed and manufactured by Canadair between 1964 and 1972. Only four of these experimental aircraft were built with three entering flight testing. Two of the CL-84s crashed due to mechanical failures, with no fatalities occurring in either of the accidents. Despite the CL-84 being successful in the experimental and operational trials carried out between 1972 and 1974, none of the prospective customers placed any orders for the type.

On a helicopter, the main rotor or rotor system is the combination of several rotary wings with a control system, that generates the aerodynamic lift force that supports the weight of the helicopter, and the thrust that counteracts aerodynamic drag in forward flight. Each main rotor is mounted on a vertical mast over the top of the helicopter, as opposed to a helicopter tail rotor, which connects through a combination of drive shaft(s) and gearboxes along the tail boom. The blade pitch is typically controlled by the pilot using the helicopter flight controls. Helicopters are one example of rotary-wing aircraft (rotorcraft). The name is derived from the Greek words helix, helik-, meaning spiral; and pteron meaning wing.

A quadcopter or quadrotor is a type of helicopter that has four rotors.

A helicopter is a type of rotorcraft in which lift and thrust are supplied by horizontally spinning rotors. This allows the helicopter to take off and land vertically, to hover, and to fly forward, backward and laterally. These attributes allow helicopters to be used in congested or isolated areas where fixed-wing aircraft and many forms of short take-off and landing (STOL) or short take-off and vertical landing (STOVL) aircraft cannot perform without a runway.
Flapback or blowback is the tilting of a helicopter rotor disc, usually aft (backwards), which occurs in several circumstances.
The center of gravity (CG) of an aircraft is the point over which the aircraft would balance. Its position is calculated after supporting the aircraft on at least two sets of weighing scales or load cells and noting the weight shown on each set of scales or load cells. The center of gravity affects the stability of the aircraft. To ensure the aircraft is safe to fly, the center of gravity must fall within specified limits established by the aircraft manufacturer.
References
- ↑ "Longitudinal stability and control of large tilt-rotor aircraft". IFAC-PapersOnLine. 2008-10-17. Retrieved 2010-10-05.
- ↑ Mark Voskuijl, Daniel J. Walker. "Active Control of Flight Path and Critical Loads in Tilt-Rotor Aircraft" (PDF). Engineering Department: University of Liverpool. Retrieved 5 October 2010.
- ↑ "Measuring Simulation Fidelity through an Adaptive Pilot Model" (PDF). Retrieved 2010-10-05.
| | This article about transport is a stub. You can help Wikipedia by expanding it. |