Related Research Articles

A tremor is an involuntary, somewhat rhythmic, muscle contraction and relaxation involving oscillations or twitching movements of one or more body parts. It is the most common of all involuntary movements and can affect the hands, arms, eyes, face, head, vocal folds, trunk, and legs. Most tremors occur in the hands. In some people, a tremor is a symptom of another neurological disorder.

Motion capture is the process of recording the movement of objects or people. It is used in military, entertainment, sports, medical applications, and for validation of computer vision and robots. In filmmaking and video game development, it refers to recording actions of human actors and using that information to animate digital character models in 2D or 3D computer animation. When it includes face and fingers or captures subtle expressions, it is often referred to as performance capture. In many fields, motion capture is sometimes called motion tracking, but in filmmaking and games, motion tracking usually refers more to match moving.

The parietal lobe is one of the four major lobes of the cerebral cortex in the brain of mammals. The parietal lobe is positioned above the temporal lobe and behind the frontal lobe and central sulcus.

A gait is a manner of limb movements made during locomotion. Human gaits are the various ways in which humans can move, either naturally or as a result of specialized training. Human gait is defined as bipedal forward propulsion of the center of gravity of the human body, in which there are sinuous movements of different segments of the body with little energy spent. Varied gaits are characterized by differences such as limb movement patterns, overall velocity, forces, kinetic and potential energy cycles, and changes in contact with the ground.

Gesture recognition is an area of research and development in computer science and language technology concerned with the recognition and interpretation of human gestures. A subdiscipline of computer vision, it employs mathematical algorithms to interpret gestures. Gestures can originate from any bodily motion or state, but commonly originate from the face or hand. One area of the field is emotion recognition derived from facial expressions and hand gestures. Users can make simple gestures to control or interact with devices without physically touching them. Many approaches have been made using cameras and computer vision algorithms to interpret sign language, however, the identification and recognition of posture, gait, proxemics, and human behaviors is also the subject of gesture recognition techniques. Gesture recognition is a path for computers to begin to better understand and interpret human body language, previously not possible through text or unenhanced graphical (GUI) user interfaces.
Inverse dynamics is an inverse problem. It commonly refers to either inverse rigid body dynamics or inverse structural dynamics. Inverse rigid-body dynamics is a method for computing forces and/or moments of force (torques) based on the kinematics (motion) of a body and the body's inertial properties. Typically it uses link-segment models to represent the mechanical behaviour of interconnected segments, such as the limbs of humans or animals or the joint extensions of robots, where given the kinematics of the various parts, inverse dynamics derives the minimum forces and moments responsible for the individual movements. In practice, inverse dynamics computes these internal moments and forces from measurements of the motion of limbs and external forces such as ground reaction forces, under a special set of assumptions.

Actroid is a type of android with strong visual human-likeness developed by Osaka University and manufactured by Kokoro Company Ltd.. It was first unveiled at the 2003 International Robot Exhibition in Tokyo, Japan. Several different versions of the product have been produced since then. In most cases, the robot's appearance has been modeled after an average young woman of Japanese descent.
Sensory processing is the process that organizes and distinguishes sensation from one's own body and the environment, thus making it possible to use the body effectively within the environment. Specifically, it deals with how the brain processes multiple sensory modality inputs, such as proprioception, vision, auditory system, tactile, olfactory, vestibular system, interoception, and taste into usable functional outputs.
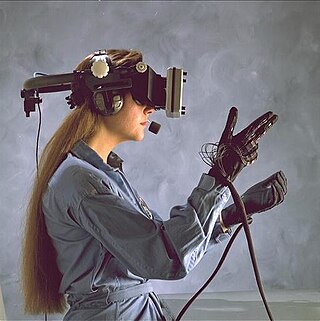
A wired glove is an input device for human–computer interaction worn like a glove.
Motor control is the regulation of movements in organisms that possess a nervous system. Motor control includes conscious voluntary movements, subconscious muscle memory and involuntary reflexes, as well as instinctual taxis.
In physiology, motor coordination is the orchestrated movement of multiple body parts as required to accomplish intended actions, like walking. This coordination is achieved by adjusting kinematic and kinetic parameters associated with each body part involved in the intended movement. The modifications of these parameters typically relies on sensory feedback from one or more sensory modalities, such as proprioception and vision.

The vestibulospinal tract is a neural tract in the central nervous system. Specifically, it is a component of the extrapyramidal system and is classified as a component of the medial pathway. Like other descending motor pathways, the vestibulospinal fibers of the tract relay information from nuclei to motor neurons. The vestibular nuclei receive information through the vestibulocochlear nerve about changes in the orientation of the head. The nuclei relay motor commands through the vestibulospinal tract. The function of these motor commands is to alter muscle tone, extend, and change the position of the limbs and head with the goal of supporting posture and maintaining balance of the body and head.
Neurorobotics is the combined study of neuroscience, robotics, and artificial intelligence. It is the science and technology of embodied autonomous neural systems. Neural systems include brain-inspired algorithms, computational models of biological neural networks and actual biological systems. Such neural systems can be embodied in machines with mechanic or any other forms of physical actuation. This includes robots, prosthetic or wearable systems but also, at smaller scale, micro-machines and, at the larger scales, furniture and infrastructures.
Body schema is a postural model that keeps track of limb position. The neurologist Sir Henry Head originally defined it as a postural model of the body that actively organizes and modifies 'the impressions produced by incoming sensory impulses in such a way that the final sensation of body position, or of locality, rises into consciousness charged with a relation to something that has happened before'. As a postural model that keeps track of limb position, it plays an important role in control of action. It involves aspects of both central and peripheral systems. Thus, a body schema can be considered the collection of processes that registers the posture of one's body parts in space. The schema is updated during body movement. This is typically a non-conscious process, and is used primarily for spatial organization of action. It is therefore a pragmatic representation of the body’s spatial properties, which includes the length of limbs and limb segments, their arrangement, the configuration of the segments in space, and the shape of the body surface. Body schema also plays an important role in the integration and use of tools by humans.

Proprioception, also called kinaesthesia, is the sense of self-movement, force, and body position.

Blocq's disease was first considered by Paul Blocq (1860–1896), who described this phenomenon as the loss of memory of specialized movements causing the inability to maintain an upright posture, despite normal function of the legs in the bed. The patient is able to stand up, but as soon as the feet are on the ground, the patient cannot hold himself upright nor walk; however when lying down, the subject conserved the integrity of muscular force and the precision of movements of the lower limbs. The motivation of this study came when a fellow student Georges Marinesco (1864) and Paul published a case of parkinsonian tremor (1893) due to a tumor located in the substantia nigra.

Spinal locomotion results from intricate dynamic interactions between a central program in lower thoracolumbar spine and proprioceptive feedback from body in the absence of central control by brain as in complete spinal cord injury (SCI). Following SCI, the spinal circuitry below the lesion site does not become silent; rather, it continues to maintain active and functional neuronal properties, although in a modified manner.
Sensory-motor coupling is the coupling or integration of the sensory system and motor system. Sensorimotor integration is not a static process. For a given stimulus, there is no one single motor command. "Neural responses at almost every stage of a sensorimotor pathway are modified at short and long timescales by biophysical and synaptic processes, recurrent and feedback connections, and learning, as well as many other internal and external variables".
In neuroscience and motor control, the degrees of freedom problem or motor equivalence problem states that there are multiple ways for humans or animals to perform a movement in order to achieve the same goal. In other words, under normal circumstances, no simple one-to-one correspondence exists between a motor problem and a motor solution to the problem. The motor equivalence problem was first formulated by the Russian neurophysiologist Nikolai Bernstein: "It is clear that the basic difficulties for co-ordination consist precisely in the extreme abundance of degrees of freedom, with which the [nervous] centre is not at first in a position to deal."
Gain field encoding is a hypothesis about the internal storage and processing of limb motion in the brain. In the motor areas of the brain, there are neurons which collectively have the ability to store information regarding both limb positioning and velocity in relation to both the body (intrinsic) and the individual's external environment (extrinsic). The input from these neurons is taken multiplicatively, forming what is referred to as a gain field. The gain field works as a collection of internal models off of which the body can base its movements. The process of encoding and recalling these models is the basis of muscle memory.
References
- Montesano, Luis; Lopes, Manuel; Bernardino, Alexandre; Santos-Victor, José (2008). "Learning Object Affordances: From Sensory-Motor Coordination to Imitation" (PDF). IEEE Transactions on Robotics. Institute of Electrical and Electronics Engineers. 24 (1): 15–26. doi:10.1109/tro.2007.914848. ISSN 1552-3098 . Retrieved 10 November 2023.