In mathematics, a dynamical system is a system in which a function describes the time dependence of a point in an ambient space, such as in a parametric curve. Examples include the mathematical models that describe the swinging of a clock pendulum, the flow of water in a pipe, the random motion of particles in the air, and the number of fish each springtime in a lake. The most general definition unifies several concepts in mathematics such as ordinary differential equations and ergodic theory by allowing different choices of the space and how time is measured. Time can be measured by integers, by real or complex numbers or can be a more general algebraic object, losing the memory of its physical origin, and the space may be a manifold or simply a set, without the need of a smooth space-time structure defined on it.
In mathematics, a real function of real numbers is said to be uniformly continuous if there is a positive real number such that function values over any function domain interval of the size are as close to each other as we want. In other words, for a uniformly continuous real function of real numbers, if we want function value differences to be less than any positive real number , then there is a positive real number such that at any and in any function interval of the size .
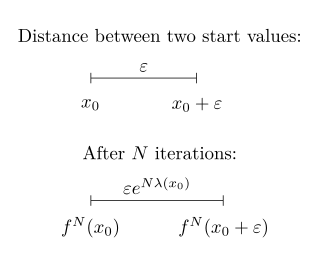
In mathematics, the Lyapunov exponent or Lyapunov characteristic exponent of a dynamical system is a quantity that characterizes the rate of separation of infinitesimally close trajectories. Quantitatively, two trajectories in phase space with initial separation vector diverge at a rate given by
In mathematics, the Laplace operator or Laplacian is a differential operator given by the divergence of the gradient of a scalar function on Euclidean space. It is usually denoted by the symbols , (where is the nabla operator), or . In a Cartesian coordinate system, the Laplacian is given by the sum of second partial derivatives of the function with respect to each independent variable. In other coordinate systems, such as cylindrical and spherical coordinates, the Laplacian also has a useful form. Informally, the Laplacian Δf (p) of a function f at a point p measures by how much the average value of f over small spheres or balls centered at p deviates from f (p).
In vector calculus, Green's theorem relates a line integral around a simple closed curve C to a double integral over the plane region D bounded by C. It is the two-dimensional special case of Stokes' theorem.
Various types of stability may be discussed for the solutions of differential equations or difference equations describing dynamical systems. The most important type is that concerning the stability of solutions near to a point of equilibrium. This may be discussed by the theory of Aleksandr Lyapunov. In simple terms, if the solutions that start out near an equilibrium point stay near forever, then is Lyapunov stable. More strongly, if is Lyapunov stable and all solutions that start out near converge to , then is said to be asymptotically stable. The notion of exponential stability guarantees a minimal rate of decay, i.e., an estimate of how quickly the solutions converge. The idea of Lyapunov stability can be extended to infinite-dimensional manifolds, where it is known as structural stability, which concerns the behavior of different but "nearby" solutions to differential equations. Input-to-state stability (ISS) applies Lyapunov notions to systems with inputs.
In mathematics, the Gauss–Kuzmin–Wirsing operator is the transfer operator of the Gauss map that takes a positive number to the fractional part of its reciprocal. It is named after Carl Gauss, Rodion Kuzmin, and Eduard Wirsing. It occurs in the study of continued fractions; it is also related to the Riemann zeta function.
In mathematics, ergodic flows occur in geometry, through the geodesic and horocycle flows of closed hyperbolic surfaces. Both of these examples have been understood in terms of the theory of unitary representations of locally compact groups: if Γ is the fundamental group of a closed surface, regarded as a discrete subgroup of the Möbius group G = PSL(2,R), then the geodesic and horocycle flow can be identified with the natural actions of the subgroups A of real positive diagonal matrices and N of lower unitriangular matrices on the unit tangent bundle G / Γ. The Ambrose-Kakutani theorem expresses every ergodic flow as the flow built from an invertible ergodic transformation on a measure space using a ceiling function. In the case of geodesic flow, the ergodic transformation can be understood in terms of symbolic dynamics; and in terms of the ergodic actions of Γ on the boundary S1 = G / AN and G / A = S1 × S1 \ diag S1. Ergodic flows also arise naturally as invariants in the classification of von Neumann algebras: the flow of weights for a factor of type III0 is an ergodic flow on a measure space.
In geometric topology, Busemann functions are used to study the large-scale geometry of geodesics in Hadamard spaces and in particular Hadamard manifolds. They are named after Herbert Busemann, who introduced them; he gave an extensive treatment of the topic in his 1955 book "The geometry of geodesics".

In the study of dynamical systems, a hyperbolic equilibrium point or hyperbolic fixed point is a fixed point that does not have any center manifolds. Near a hyperbolic point the orbits of a two-dimensional, non-dissipative system resemble hyperbolas. This fails to hold in general. Strogatz notes that "hyperbolic is an unfortunate name—it sounds like it should mean 'saddle point'—but it has become standard." Several properties hold about a neighborhood of a hyperbolic point, notably
In the mathematics of evolving systems, the concept of a center manifold was originally developed to determine stability of degenerate equilibria. Subsequently, the concept of center manifolds was realised to be fundamental to mathematical modelling.

In mathematics, and in particular the study of dynamical systems, the idea of stable and unstable sets or stable and unstable manifolds give a formal mathematical definition to the general notions embodied in the idea of an attractor or repellor. In the case of hyperbolic dynamics, the corresponding notion is that of the hyperbolic set.
In mathematics, Smale's axiom A defines a class of dynamical systems which have been extensively studied and whose dynamics is relatively well understood. A prominent example is the Smale horseshoe map. The term "axiom A" originates with Stephen Smale. The importance of such systems is demonstrated by the chaotic hypothesis, which states that, 'for all practical purposes', a many-body thermostatted system is approximated by an Anosov system.

In mathematics, stability theory addresses the stability of solutions of differential equations and of trajectories of dynamical systems under small perturbations of initial conditions. The heat equation, for example, is a stable partial differential equation because small perturbations of initial data lead to small variations in temperature at a later time as a result of the maximum principle. In partial differential equations one may measure the distances between functions using Lp norms or the sup norm, while in differential geometry one may measure the distance between spaces using the Gromov–Hausdorff distance.
In mathematics, the Melnikov method is a tool to identify the existence of chaos in a class of dynamical systems under periodic perturbation.
Numerical continuation is a method of computing approximate solutions of a system of parameterized nonlinear equations,

In mathematics, a quasi-isometry is a function between two metric spaces that respects large-scale geometry of these spaces and ignores their small-scale details. Two metric spaces are quasi-isometric if there exists a quasi-isometry between them. The property of being quasi-isometric behaves like an equivalence relation on the class of metric spaces.
A randomness extractor, often simply called an "extractor", is a function, which being applied to output from a weak entropy source, together with a short, uniformly random seed, generates a highly random output that appears independent from the source and uniformly distributed. Examples of weakly random sources include radioactive decay or thermal noise; the only restriction on possible sources is that there is no way they can be fully controlled, calculated or predicted, and that a lower bound on their entropy rate can be established. For a given source, a randomness extractor can even be considered to be a true random number generator (TRNG); but there is no single extractor that has been proven to produce truly random output from any type of weakly random source.

Lagrangian coherent structures (LCSs) are distinguished surfaces of trajectories in a dynamical system that exert a major influence on nearby trajectories over a time interval of interest. The type of this influence may vary, but it invariably creates a coherent trajectory pattern for which the underlying LCS serves as a theoretical centerpiece. In observations of tracer patterns in nature, one readily identifies coherent features, but it is often the underlying structure creating these features that is of interest.

Charles Chapman Pugh is an American mathematician who researches dynamical systems. Pugh received his PhD under Philip Hartman of Johns Hopkins University in 1965, with the dissertation The Closing Lemma for Dimensions Two and Three. He has since been a professor, now emeritus, at the University of California, Berkeley.



