Control theory is a field of control engineering and applied mathematics that deals with the control of dynamical systems in engineered processes and machines. The objective is to develop a model or algorithm governing the application of system inputs to drive the system to a desired state, while minimizing any delay, overshoot, or steady-state error and ensuring a level of control stability; often with the aim to achieve a degree of optimality.
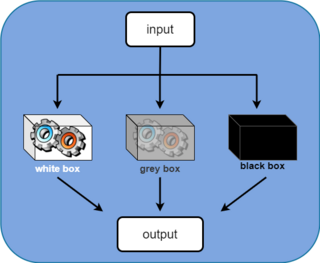
The field of system identification uses statistical methods to build mathematical models of dynamical systems from measured data. System identification also includes the optimal design of experiments for efficiently generating informative data for fitting such models as well as model reduction. A common approach is to start from measurements of the behavior of the system and the external influences and try to determine a mathematical relation between them without going into many details of what is actually happening inside the system; this approach is called black box system identification.
Observability is a measure of how well internal states of a system can be inferred from knowledge of its external outputs.
Model predictive control (MPC) is an advanced method of process control that is used to control a process while satisfying a set of constraints. It has been in use in the process industries in chemical plants and oil refineries since the 1980s. In recent years it has also been used in power system balancing models and in power electronics. Model predictive controllers rely on dynamic models of the process, most often linear empirical models obtained by system identification. The main advantage of MPC is the fact that it allows the current timeslot to be optimized, while keeping future timeslots in account. This is achieved by optimizing a finite time-horizon, but only implementing the current timeslot and then optimizing again, repeatedly, thus differing from a linear–quadratic regulator (LQR). Also MPC has the ability to anticipate future events and can take control actions accordingly. PID controllers do not have this predictive ability. MPC is nearly universally implemented as a digital control, although there is research into achieving faster response times with specially designed analog circuitry.
In control theory, a state observer or state estimator is a system that provides an estimate of the internal state of a given real system, from measurements of the input and output of the real system. It is typically computer-implemented, and provides the basis of many practical applications.
Nonlinear control theory is the area of control theory which deals with systems that are nonlinear, time-variant, or both. Control theory is an interdisciplinary branch of engineering and mathematics that is concerned with the behavior of dynamical systems with inputs, and how to modify the output by changes in the input using feedback, feedforward, or signal filtering. The system to be controlled is called the "plant". One way to make the output of a system follow a desired reference signal is to compare the output of the plant to the desired output, and provide feedback to the plant to modify the output to bring it closer to the desired output.
Eliahu Ibrahim Jury was an Iraqi-born American engineer. He received his the E.E. degree from the Technion – Israel Institute of Technology, Haifa, Mandatory Palestine, in 1947, the M.S. degree in electrical engineering from Harvard University, Cambridge, MA, in 1949, and the Sc.D. degree degree from Columbia University of New York City in 1953. He was professor of electrical engineering at the University of California, Berkeley, and the University of Miami.
Integral windup, also known as integrator windup or reset windup, refers to the situation in a PID controller where a large change in setpoint occurs and the integral term accumulates a significant error during the rise (windup), thus overshooting and continuing to increase as this accumulated error is unwound. The specific problem is the excess overshooting.

Feedback linearization is a common strategy employed in nonlinear control to control nonlinear systems. Feedback linearization techniques may be applied to nonlinear control systems of the form
Dual control theory is a branch of control theory that deals with the control of systems whose characteristics are initially unknown. It is called dual because in controlling such a system the controller's objectives are twofold:

Alberto Isidori was born on January 24, 1942, in Rapallo and is an Italian control theorist. He is a Professor of Automatic Control at the University of Rome and an Affiliate Professor of Electrical & Systems Engineering at Washington University in St. Louis. He is well-known as the author of the book Nonlinear Control Systems, a highly-cited reference in nonlinear control.
Design Automation usually refers to electronic design automation, or Design Automation which is a Product Configurator. Extending Computer-Aided Design (CAD), automated design and Computer-Automated Design (CAutoD) are more concerned with a broader range of applications, such as automotive engineering, civil engineering, composite material design, control engineering, dynamic system identification and optimization, financial systems, industrial equipment, mechatronic systems, steel construction, structural optimisation, and the invention of novel systems.
Dragoslav D. Šiljak is Professor Emeritus of Electrical Engineering at Santa Clara University, where he held the title of Benjamin and Mae Swig University Professor. He is best known for developing the mathematical theory and methods for control of complex dynamic systems characterized by large-scale, information structure constraints and uncertainty.
In the bifurcation theory, a bounded oscillation that is born without loss of stability of stationary set is called a hidden oscillation. In nonlinear control theory, the birth of a hidden oscillation in a time-invariant control system with bounded states means crossing a boundary, in the domain of the parameters, where local stability of the stationary states implies global stability. If a hidden oscillation attracts all nearby oscillations, then it is called a hidden attractor. For a dynamical system with a unique equilibrium point that is globally attractive, the birth of a hidden attractor corresponds to a qualitative change in behaviour from monostability to bi-stability. In the general case, a dynamical system may turn out to be multistable and have coexisting local attractors in the phase space. While trivial attractors, i.e. stable equilibrium points, can be easily found analytically or numerically, the search of periodic and chaotic attractors can turn out to be a challenging problem.
Kalman's conjecture or Kalman problem is a disproved conjecture on absolute stability of nonlinear control system with one scalar nonlinearity, which belongs to the sector of linear stability. Kalman's conjecture is a strengthening of Aizerman's conjecture and is a special case of Markus–Yamabe conjecture. This conjecture was proven false but led to the (valid) sufficient criteria on absolute stability.

Wassim Michael Haddad is a Lebanese-Greek-American applied mathematician, scientist, and engineer, with research specialization in the areas of dynamical systems and control. His research has led to fundamental breakthroughs in applied mathematics, thermodynamics, stability theory, robust control, dynamical system theory, and neuroscience. Professor Haddad is a member of the faculty of the School of Aerospace Engineering at Georgia Institute of Technology, where he holds the rank of Professor and Chair of the Flight Mechanics and Control Discipline. Dr. Haddad is a member of the Academy of Nonlinear SciencesArchived 2016-03-04 at the Wayback Machine for recognition of paramount contributions to the fields of nonlinear stability theory, nonlinear dynamical systems, and nonlinear control and an IEEE Fellow for contributions to robust, nonlinear, and hybrid control systems.

Edward Ott is an American physicist most noted for his contributions to the development of chaos theory.
Arthur James Krener is a distinguished visiting professor in the department of applied mathematics at the Naval Postgraduate School. He has made contributions in the areas of control theory, nonlinear control, and stochastic processes.
Ji-Feng Zhang was born in Shandong, China. He is currently the vice-chair of the technical board of the International Federation of Automatic Control (IFAC), the vice-president of the Systems Engineering Society of China (SESC), the vice-president of the Chinese Association of Automation (CAA), the chair of the technical committee on Control Theory (CAA), and the editor-in-chief for both All About Systems and Control and the Journal of Systems Science and Mathematical Sciences.

Stefano Stramigioli is a scientist and engineer born in Italy and now living since 1992 in the Netherlands and holding both the Italian and Dutch nationality. He is affiliated with the University of Twente where he leads the Robotics And Mechatronics (RAM) Lab. He is also covering a guest co-chair position at the International Laboratory of BioMechatronics and Energy Efficient Robotics at ITMO, St. Petersburg, Russia.