
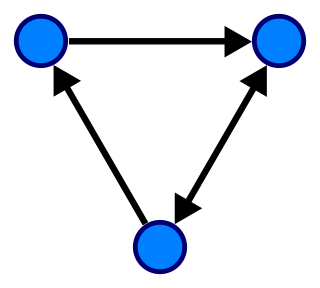
In mathematics, and more specifically in graph theory, a directed graph (or digraph) is a graph that is made up of a set of vertices connected by directed edges, often called arcs.
In mathematics, and more specifically in graph theory, a directed graph (or digraph) is a graph that is made up of a set of vertices connected by directed edges, often called arcs.
In formal terms, a directed graph is an ordered pair G = (V, A) where [1]
It differs from an ordinary or undirected graph, in that the latter is defined in terms of unordered pairs of vertices, which are usually called edges, links or lines.
The aforementioned definition does not allow a directed graph to have multiple arrows with the same source and target nodes, but some authors consider a broader definition that allows directed graphs to have such multiple arcs (namely, they allow the arc set to be a multiset). Sometimes these entities are called directed multigraphs (or multidigraphs).
On the other hand, the aforementioned definition allows a directed graph to have loops (that is, arcs that directly connect nodes with themselves), but some authors consider a narrower definition that does not allow directed graphs to have loops. [2] Directed graphs without loops may be called simple directed graphs, while directed graphs with loops may be called loop-digraphs (see section Types of directed graph).



An arc (x, y) is considered to be directed fromxtoy; y is called the head and x is called the tail of the arc; y is said to be a direct successor of x and x is said to be a direct predecessor of y. If a path leads from x to y, then y is said to be a successor of x and reachable from x, and x is said to be a predecessor of y. The arc (y, x) is called the reversed arc of (x, y).
The adjacency matrix of a multidigraph with loops is the integer-valued matrix with rows and columns corresponding to the vertices, where a nondiagonal entry aij is the number of arcs from vertex i to vertex j, and the diagonal entry aii is the number of loops at vertex i. The adjacency matrix of a directed graph is a logical matrix, and is unique up to permutation of rows and columns.
Another matrix representation for a directed graph is its incidence matrix.
See direction for more definitions.

For a vertex, the number of head ends adjacent to a vertex is called the indegree of the vertex and the number of tail ends adjacent to a vertex is its outdegree (called branching factor in trees).
Let G = (V, E) and v ∈ V. The indegree of v is denoted deg−(v) and its outdegree is denoted deg+(v).
A vertex with deg−(v) = 0 is called a source, as it is the origin of each of its outcoming arcs. Similarly, a vertex with deg+(v) = 0 is called a sink, since it is the end of each of its incoming arcs.
The degree sum formula states that, for a directed graph,
If for every vertex v ∈ V, deg+(v) = deg−(v), the graph is called a balanced directed graph. [8]
The degree sequence of a directed graph is the list of its indegree and outdegree pairs; for the above example we have degree sequence ((2, 0), (2, 2), (0, 2), (1, 1)). The degree sequence is a directed graph invariant so isomorphic directed graphs have the same degree sequence. However, the degree sequence does not, in general, uniquely identify a directed graph; in some cases, non-isomorphic digraphs have the same degree sequence.
The directed graph realization problem is the problem of finding a directed graph with the degree sequence a given sequence of positive integer pairs. (Trailing pairs of zeros may be ignored since they are trivially realized by adding an appropriate number of isolated vertices to the directed graph.) A sequence which is the degree sequence of some directed graph, i.e. for which the directed graph realization problem has a solution, is called a directed graphic or directed graphical sequence. This problem can either be solved by the Kleitman–Wang algorithm or by the Fulkerson–Chen–Anstee theorem.
A directed graph is weakly connected (or just connected [9] ) if the undirected underlying graph obtained by replacing all directed edges of the graph with undirected edges is a connected graph.
A directed graph is strongly connected or strong if it contains a directed path from x to y (and from y to x) for every pair of vertices (x, y). The strong components are the maximal strongly connected subgraphs.
A connected rooted graph (or flow graph) is one where there exists a directed path to every vertex from a distinguished root vertex.

In mathematics, graph theory is the study of graphs, which are mathematical structures used to model pairwise relations between objects. A graph in this context is made up of vertices which are connected by edges. A distinction is made between undirected graphs, where edges link two vertices symmetrically, and directed graphs, where edges link two vertices asymmetrically. Graphs are one of the principal objects of study in discrete mathematics.
In the mathematical field of graph theory, a complete graph is a simple undirected graph in which every pair of distinct vertices is connected by a unique edge. A complete digraph is a directed graph in which every pair of distinct vertices is connected by a pair of unique edges.

In mathematics, particularly graph theory, and computer science, a directed acyclic graph (DAG) is a directed graph with no directed cycles. That is, it consists of vertices and edges, with each edge directed from one vertex to another, such that following those directions will never form a closed loop. A directed graph is a DAG if and only if it can be topologically ordered, by arranging the vertices as a linear ordering that is consistent with all edge directions. DAGs have numerous scientific and computational applications, ranging from biology to information science to computation (scheduling).

In the mathematical field of graph theory, a bipartite graph is a graph whose vertices can be divided into two disjoint and independent sets and , that is, every edge connects a vertex in to one in . Vertex sets and are usually called the parts of the graph. Equivalently, a bipartite graph is a graph that does not contain any odd-length cycles.

In the mathematical field of graph theory, a Hamiltonian path is a path in an undirected or directed graph that visits each vertex exactly once. A Hamiltonian cycle is a cycle that visits each vertex exactly once. A Hamiltonian path that starts and ends at adjacent vertices can be completed by adding one more edge to form a Hamiltonian cycle, and removing any edge from a Hamiltonian cycle produces a Hamiltonian path. The computational problems of determining whether such paths and cycles exist in graphs are NP-complete; see Hamiltonian path problem for details.
In graph theory and computer science, an adjacency matrix is a square matrix used to represent a finite graph. The elements of the matrix indicate whether pairs of vertices are adjacent or not in the graph.
This is a glossary of graph theory. Graph theory is the study of graphs, systems of nodes or vertices connected in pairs by lines or edges.
In discrete mathematics, and more specifically in graph theory, a graph is a structure amounting to a set of objects in which some pairs of the objects are in some sense "related". The objects are represented by abstractions called vertices and each of the related pairs of vertices is called an edge. Typically, a graph is depicted in diagrammatic form as a set of dots or circles for the vertices, joined by lines or curves for the edges.
In mathematics, an incidence matrix is a logical matrix that shows the relationship between two classes of objects, usually called an incidence relation. If the first class is X and the second is Y, the matrix has one row for each element of X and one column for each element of Y. The entry in row x and column y is 1 if x and y are related and 0 if they are not. There are variations; see below.
In computer science, a graph is an abstract data type that is meant to implement the undirected graph and directed graph concepts from the field of graph theory within mathematics.
In discrete mathematics, and more specifically in graph theory, a vertex or node is the fundamental unit of which graphs are formed: an undirected graph consists of a set of vertices and a set of edges, while a directed graph consists of a set of vertices and a set of arcs. In a diagram of a graph, a vertex is usually represented by a circle with a label, and an edge is represented by a line or arrow extending from one vertex to another.
In the mathematical field of graph theory, the distance between two vertices in a graph is the number of edges in a shortest path connecting them. This is also known as the geodesic distance or shortest-path distance. Notice that there may be more than one shortest path between two vertices. If there is no path connecting the two vertices, i.e., if they belong to different connected components, then conventionally the distance is defined as infinite.

In graph theory, the degree of a vertex of a graph is the number of edges that are incident to the vertex; in a multigraph, a loop contributes 2 to a vertex's degree, for the two ends of the edge. The degree of a vertex is denoted or . The maximum degree of a graph is denoted by , and is the maximum of 's vertices' degrees. The minimum degree of a graph is denoted by , and is the minimum of 's vertices' degrees. In the multigraph shown on the right, the maximum degree is 5 and the minimum degree is 0.

A tournament is a directed graph (digraph) obtained by assigning a direction for each edge in an undirected complete graph. That is, it is an orientation of a complete graph, or equivalently a directed graph in which every pair of distinct vertices is connected by a directed edge with any one of the two possible orientations.

In graph theory and network analysis, indicators of centrality assign numbers or rankings to nodes within a graph corresponding to their network position. Applications include identifying the most influential person(s) in a social network, key infrastructure nodes in the Internet or urban networks, super-spreaders of disease, and brain networks. Centrality concepts were first developed in social network analysis, and many of the terms used to measure centrality reflect their sociological origin.
In mathematics and computer science, connectivity is one of the basic concepts of graph theory: it asks for the minimum number of elements that need to be removed to separate the remaining nodes into two or more isolated subgraphs. It is closely related to the theory of network flow problems. The connectivity of a graph is an important measure of its resilience as a network.

In mathematics, and more specifically in graph theory, a multigraph is a graph which is permitted to have multiple edges, that is, edges that have the same end nodes. Thus two vertices may be connected by more than one edge.
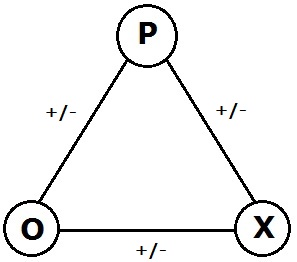
In the area of graph theory in mathematics, a signed graph is a graph in which each edge has a positive or negative sign.

Ore's theorem is a result in graph theory proved in 1960 by Norwegian mathematician Øystein Ore. It gives a sufficient condition for a graph to be Hamiltonian, essentially stating that a graph with sufficiently many edges must contain a Hamilton cycle. Specifically, the theorem considers the sum of the degrees of pairs of non-adjacent vertices: if every such pair has a sum that at least equals the total number of vertices in the graph, then the graph is Hamiltonian.

In graph theory, a pseudoforest is an undirected graph in which every connected component has at most one cycle. That is, it is a system of vertices and edges connecting pairs of vertices, such that no two cycles of consecutive edges share any vertex with each other, nor can any two cycles be connected to each other by a path of consecutive edges. A pseudotree is a connected pseudoforest.
