This article needs additional citations for verification .(May 2015) |


An Integraph is a mechanical analog computing device for plotting the integral of a graphically defined function.
This article needs additional citations for verification .(May 2015) |
An Integraph is a mechanical analog computing device for plotting the integral of a graphically defined function.
Gaspard-Gustave de Coriolis first described the fundamental principal of a mechanical integraph in 1836 in the Journal de Mathématiques Pures et Appliquées . [1] A full description of an integraph was published independently around 1880 by both British physicist Sir Charles Vernon Boys and Bruno Abdank-Abakanowicz, a Polish-Lithuanian mathematician/electrical engineer. [2] [3] Boys described a design for an integraph in 1881 in the Philosophical Magazine . [3] Abakanowicz developed a practical working prototype in 1878, with improved versions of the prototype being manufactured by firms such as Coradi in Zürich, Switzerland. [3] [4] [1] Customized and further improved versions of Abakanowicz's design were manufactured until well after 1900, with these later modifications being made by Abakanowicz in collaboration M. D. Napoli, the "principal inspector of the railroad Chemin de Fer de l’Est and head of its testing laboratory". [1]
The input to the integraph is a tracing point that is the guiding point that traces the differential curve. [2] The output is defined by the path a disk that rolls along the paper without slipping takes. The mechanism sets the angle of the output disk based on the position of the input curve: if the input is zero, the disk is angled to roll straight, parallel to the x axis on the Cartesian plane. If the input is above zero the disk is angled slightly toward the positive y direction, such that the y value of its position increases as it rolls in that direction. If the input is below zero, the disk is angled the other way such that its y position decreases as it rolls.
The hardware consists of a rectangular carriage which moves left to right on rollers. Two sides of the carriage run parallel to the x axis. The other two sides are parallel to the y axis. Along the trailing vertical (y axis) rail slides a smaller carriage holding a tracing point. Along the leading vertical rail slides a second smaller carriage to which is affixed a small, sharp disc, which rests and rolls (but does not slide) on the graphing paper. The trailing carriage is connected both with a point in the center of the carriage and the disc on the leading rail by a system of sliding crossheads and wires, such that the tracing point must follow the disc's tangential path.
The integraph plots (traces) the integral curve
when we are given the differential curve,
The mathematical basis of the mechanism depends on the following considerations: [5] For any point (x, y) of the differential curve, construct the auxiliary triangle with vertices (x, y), (x, 0) and (x − 1, 0). The hypotenuse of this right triangle intersects the X-axis making an angle the value of whose tangent is y. This hypotenuse is parallel to the tangent line of the integral curve at (X, Y) that corresponds to (x, y).
The integraph may be used to obtain a quadrature of the circle. If the differential curve is the unit circle, the integral curve intersects the lines X = ± 1 at points that are equally spaced at a distance of π/2. [5]
In mathematics, analytic geometry, also known as coordinate geometry or Cartesian geometry, is the study of geometry using a coordinate system. This contrasts with synthetic geometry.

A circle is a shape consisting of all points in a plane that are at a given distance from a given point, the centre. The distance between any point of the circle and the centre is called the radius.
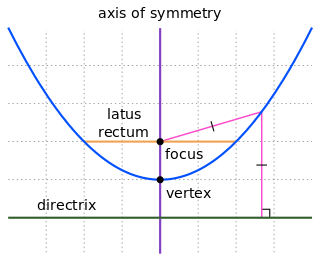
In mathematics, a parabola is a plane curve which is mirror-symmetrical and is approximately U-shaped. It fits several superficially different mathematical descriptions, which can all be proved to define exactly the same curves.

A sphere is a geometrical object that is a three-dimensional analogue to a two-dimensional circle. Formally, a sphere is the set of points that are all at the same distance r from a given point in three-dimensional space. That given point is the centre of the sphere, and r is the sphere's radius. The earliest known mentions of spheres appear in the work of the ancient Greek mathematicians.

In mathematics, the slope or gradient of a line is a number that describes both the direction and the steepness of the line. Slope is often denoted by the letter m; there is no clear answer to the question why the letter m is used for slope, but its earliest use in English appears in O'Brien (1844) who wrote the equation of a straight line as "y = mx + b" and it can also be found in Todhunter (1888) who wrote it as "y = mx + c".
In geometry, a cycloid is the curve traced by a point on a circle as it rolls along a straight line without slipping. A cycloid is a specific form of trochoid and is an example of a roulette, a curve generated by a curve rolling on another curve.

In mathematics, differential calculus is a subfield of calculus that studies the rates at which quantities change. It is one of the two traditional divisions of calculus, the other being integral calculus—the study of the area beneath a curve.
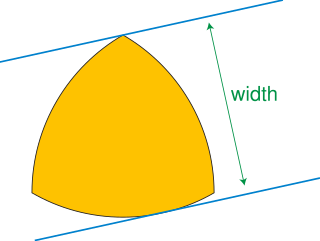
In geometry, a curve of constant width is a simple closed curve in the plane whose width is the same in all directions. The shape bounded by a curve of constant width is a body of constant width or an orbiform, the name given to these shapes by Leonhard Euler. Standard examples are the circle and the Reuleaux triangle. These curves can also be constructed using circular arcs centered at crossings of an arrangement of lines, as the involutes of certain curves, or by intersecting circles centered on a partial curve.

In mathematics, a pedal curve of a given curve results from the orthogonal projection of a fixed point on the tangent lines of this curve. More precisely, for a plane curve C and a given fixed pedal pointP, the pedal curve of C is the locus of points X so that the line PX is perpendicular to a tangent T to the curve passing through the point X. Conversely, at any point R on the curve C, let T be the tangent line at that point R; then there is a unique point X on the tangent T which forms with the pedal point P a line perpendicular to the tangent T – the pedal curve is the set of such points X, called the foot of the perpendicular to the tangent T from the fixed point P, as the variable point R ranges over the curve C.

In geometry, an envelope of a planar family of curves is a curve that is tangent to each member of the family at some point, and these points of tangency together form the whole envelope. Classically, a point on the envelope can be thought of as the intersection of two "infinitesimally adjacent" curves, meaning the limit of intersections of nearby curves. This idea can be generalized to an envelope of surfaces in space, and so on to higher dimensions.
In geometry and science, a cross section is the non-empty intersection of a solid body in three-dimensional space with a plane, or the analog in higher-dimensional spaces. Cutting an object into slices creates many parallel cross-sections. The boundary of a cross-section in three-dimensional space that is parallel to two of the axes, that is, parallel to the plane determined by these axes, is sometimes referred to as a contour line; for example, if a plane cuts through mountains of a raised-relief map parallel to the ground, the result is a contour line in two-dimensional space showing points on the surface of the mountains of equal elevation.
Critical point is a wide term used in many branches of mathematics.
In mathematics, a surface is a mathematical model of the common concept of a surface. It is a generalization of a plane, but, unlike a plane, it may be curved; this is analogous to a curve generalizing a straight line.

In mathematics, sine and cosine are trigonometric functions of an angle. The sine and cosine of an acute angle are defined in the context of a right triangle: for the specified angle, its sine is the ratio of the length of the side that is opposite that angle to the length of the longest side of the triangle, and the cosine is the ratio of the length of the adjacent leg to that of the hypotenuse. For an angle , the sine and cosine functions are denoted simply as and .

In mathematics, the differential geometry of surfaces deals with the differential geometry of smooth surfaces with various additional structures, most often, a Riemannian metric. Surfaces have been extensively studied from various perspectives: extrinsically, relating to their embedding in Euclidean space and intrinsically, reflecting their properties determined solely by the distance within the surface as measured along curves on the surface. One of the fundamental concepts investigated is the Gaussian curvature, first studied in depth by Carl Friedrich Gauss, who showed that curvature was an intrinsic property of a surface, independent of its isometric embedding in Euclidean space.

In geometry, the tangential angle of a curve in the Cartesian plane, at a specific point, is the angle between the tangent line to the curve at the given point and the x-axis.
In mathematics, the Riemannian connection on a surface or Riemannian 2-manifold refers to several intrinsic geometric structures discovered by Tullio Levi-Civita, Élie Cartan and Hermann Weyl in the early part of the twentieth century: parallel transport, covariant derivative and connection form. These concepts were put in their current form with principal bundles only in the 1950s. The classical nineteenth century approach to the differential geometry of surfaces, due in large part to Carl Friedrich Gauss, has been reworked in this modern framework, which provides the natural setting for the classical theory of the moving frame as well as the Riemannian geometry of higher-dimensional Riemannian manifolds. This account is intended as an introduction to the theory of connections.
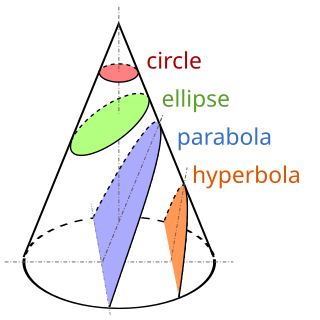
A conic section, conic or a quadratic curve is a curve obtained from a cone's surface intersecting a plane. The three types of conic section are the hyperbola, the parabola, and the ellipse; the circle is a special case of the ellipse, though it was sometimes called as a fourth type. The ancient Greek mathematicians studied conic sections, culminating around 200 BC with Apollonius of Perga's systematic work on their properties.
In mathematics, a unit circle is a circle of unit radius—that is, a radius of 1. Frequently, especially in trigonometry, the unit circle is the circle of radius 1 centered at the origin in the Cartesian coordinate system in the Euclidean plane. In topology, it is often denoted as S1 because it is a one-dimensional unit n-sphere.

Most of the terms listed in Wikipedia glossaries are already defined and explained within Wikipedia itself. However, glossaries like this one are useful for looking up, comparing and reviewing large numbers of terms together. You can help enhance this page by adding new terms or writing definitions for existing ones.
{{cite book}}: CS1 maint: others (link)Gauthier-Villars, 1886 available at Google Books

