Last updated An experiment with off-the-shelf components uses a magnet glued to the end of a rotary multitool. Its rotation causes a second magnet to levitate millimeters away from the first one.
Suspension of objects by magnetic force.
This article is about the physical phenomenon. For the form of transportation, see Maglev.
Magnetic levitation can be stabilised using different techniques; here rotation (spin) is used
Magnetic levitation (maglev) or magnetic suspension is a method by which an object is suspended with no support other than magnetic fields. Magnetic force is used to counteract the effects of the gravitational force and any other forces.
The two primary issues involved in magnetic levitation are lifting forces: providing an upward force sufficient to counteract gravity, and stability: ensuring that the system does not spontaneously slide or flip into a configuration where the lift is neutralized.
Magnetic materials and systems are able to attract or repel each other with a force dependent on the magnetic field and the area of the magnets. For example, the simplest example of lift would be a simple dipole magnet positioned in the magnetic fields of another dipole magnet, oriented with like poles facing each other, so that the force between magnets repels the two magnets.
For example, the simplest example of lift with two simple dipole magnets repelling is highly unstable, since the top magnet can slide sideways or flip over, and it turns out that no configuration of magnets can produce stability.
In some cases the lifting force is provided by magnetic repulsion, but stability is provided by a mechanical support bearing little load. This is termed pseudo-levitation.
Static stability
Static stability means that any small displacement away from a stable equilibrium causes a net force to push it back to the equilibrium point.
Earnshaw's theorem proved conclusively that it is not possible to levitate stably using only static, macroscopic, paramagnetic fields. The forces acting on any paramagnetic object in any combinations of gravitational, electrostatic, and magnetostatic fields will make the object's position, at best, unstable along at least one axis, and it can be in unstable equilibrium along all axes. However, several possibilities exist to make levitation viable, for example, the use of electronic stabilization or diamagnetic materials (since relative magnetic permeability is less than one[4]); it can be shown that diamagnetic materials are stable along at least one axis, and can be stable along all axes. Conductors can have a relative permeability to alternating magnetic fields of below one, so some configurations using simple AC-driven electromagnets are self stable.
Dynamic stability
When a levitation system uses negative feedback to maintain its equilibrium by damping out any oscillations that may occur, it has achieved dynamic stability.
For the case of a static magnetic field, the magnetic force is a conservative force and therefore can exhibit no built-in damping. In practice many of the levitation schemes are marginally stable and, when non-idealities of physical systems are considered, result in negative damping. This negative damping gives rise to exponentially growing oscillations around the magnetic field's unstable equilibrium point, inevitably causing the levitating object to be ejected from the magnetic field.[5]
Dynamic stability on the other hand, can be achieved by spinning a permanent magnet having poles slightly off the rotation plane (called tilt) in constant speed within a range which can hold another dipole magnet in the air.[6][7]
For the magnetic levitation scheme to be stable, negative feedback from an external control system can be also used to add damping to the system. This can be accomplished in a number of ways:
external mechanical damping (in the support), such as dashpots, air drag, etc.
eddy current damping (conductive metal influenced by field)
For successful levitation and control of all 6 axes (degrees of freedom; 3 translational and 3 rotational) a combination of permanent magnets and electromagnets or diamagnets or superconductors as well as attractive and repulsive fields can be used. From Earnshaw's theorem at least one stable axis must be present for the system to levitate successfully, but the other axes can be stabilized using ferromagnetism.
The primary ones used in maglev trains are servo-stabilized electromagnetic suspension (EMS), electrodynamic suspension (EDS).
Mechanical constraint (pseudo-levitation)
An example of magnetic pseudo-levitation with a mechanical guide (wooden rod) providing stability
With a small amount of mechanical constraint for stability, achieving pseudo-levitation is a relatively straightforward process.
If two magnets are mechanically constrained along a single axis, for example, and arranged to repel each other strongly, this will act to levitate one of the magnets above the other.
Another geometry is where the magnets are attracted, but prevented from touching by a tensile member, such as a string or cable.
Another example is the Zippe-type centrifuge where a cylinder is suspended under an attractive magnet, and stabilized by a needle bearing from below.
Another configuration consists of an array of permanent magnets installed in a ferromagnetic U-shaped profile and coupled with a ferromagnetic rail. The magnetic flux crosses the rail in a direction transversal to the first axis and creates a closed-loop on the U-shaped profile. This configuration generates a stable equilibrium along the first axis that maintains the rail centered on the flux crossing point (minimum magnetic reluctance) and allows to bear a load magnetically. On the other axis, the system is constrained and centered by mechanical means, such as wheels.[8]
Servomechanisms
The Transrapid system uses servomechanisms to pull the train up from underneath the track and maintains a constant gap while travelling at high speedFloating globe. Magnetic levitation with a feedback loop
The attraction from a fixed-strength magnet decreases with increased distance, and increases at closer distances. This is unstable. For a stable system, the opposite is needed: variations from a stable position should push it back to the target position.
Stable magnetic levitation can be achieved by measuring the position and speed of the object being levitated, and using a feedback loop which continuously adjusts one or more electromagnets to correct the object's motion, thus forming a servomechanism.
Many systems use magnetic attraction pulling upward against gravity for these kinds of systems as this gives some inherent lateral stability, but some use a combination of magnetic attraction and magnetic repulsion to push upward.
Either system represents examples of ElectroMagnetic Suspension (EMS). For a very simple example, some tabletop levitation demonstrations use this principle, and the object cuts a beam of light or Hall effect sensor method is used to measure the position of the object. The electromagnet is above the object being levitated; the electromagnet is turned off whenever the object gets too close, and turned back on when it falls further away. Such a simple system is not very robust; far more effective control systems exist, but this illustrates the basic idea.
EMS magnetic levitation trains are based on this kind of levitation: The train wraps around the track, and is pulled upward from below. The servo controls keep it safely at a constant distance from the track.
These schemes work due to repulsion due to Lenz's law. When a conductor is presented with a time-varying magnetic field, electrical currents are set up in the conductor which create a magnetic field that causes a repulsive effect.
These kinds of systems typically show an inherent stability, although extra damping is sometimes required.
Relative motion between conductors and magnets
If one moves a base made of a very good electrical conductor such as copper, aluminium, or silver close to a magnet, an (eddy) current will be induced in the conductor that will oppose the changes in the field and create an opposite field that will repel the magnet (Lenz's law). At a sufficiently high rate of movement, a suspended magnet will levitate on the metal, or vice versa with suspended metal. Litz wire made of wire thinner than the skin depth for the frequencies seen by the metal works much more efficiently than solid conductors. Figure-8 coils can be used to keep something aligned.[9]
An especially technologically interesting case of this comes when one uses a Halbach array instead of a single-pole permanent magnet, as this almost doubles the field strength, which in turn almost doubles the strength of the eddy currents. The net effect is to more than triple the lift force. Using two opposed Halbach arrays increases the field even further.[10]
Aluminium foil floating above the induction cooktop due to eddy currents induced in it
A conductor can be levitated above an electromagnet (or vice versa) with an alternating current flowing through it. This causes any regular conductor to behave like a diamagnet, due to the eddy currents generated in the conductor.[11][12] Since the eddy currents create their own fields which oppose the magnetic field, the conductive object is repelled from the electromagnet, and most of the field lines of the magnetic field will no longer penetrate the conductive object.
This effect requires non-ferromagnetic but highly conductive materials like aluminium or copper, as the ferromagnetic ones are also strongly attracted to the electromagnet (although at high frequencies the field can still be expelled) and tend to have a higher resistivity giving lower eddy currents. Again, litz wire gives the best results.
The effect can be used for stunts such as levitating a telephone book by concealing an aluminium plate within it.
At high frequencies (a few tens of kilohertz or so) and kilowatt powers small quantities of metals can be levitated and melted using levitation melting without the risk of the metal being contaminated by the crucible.[13]
One source of oscillating magnetic field that is used is the linear induction motor. This can be used to levitate as well as provide propulsion.
Diamagnetically stabilized levitation
Permanent magnet stably levitated between fingertips
A permanent magnet can be stably suspended by various configurations of strong permanent magnets and strong diamagnets. When using superconducting magnets, the levitation of a permanent magnet can even be stabilized by the small diamagnetism of water in human fingers.[14]
Diamagnetism is the property of an object which causes it to create a magnetic field in opposition to an externally applied magnetic field, thus causing the material to be repelled by magnetic fields. Diamagnetic materials cause lines of magnetic flux to curve away from the material. Specifically, an external magnetic field alters the orbital velocity of electrons around their nuclei, thus changing the magnetic dipole moment.
According to Lenz's law, this opposes the external field. Diamagnets are materials with a magnetic permeability less than μ0 (a relative permeability less than 1). Consequently, diamagnetism is a form of magnetism that is only exhibited by a substance in the presence of an externally applied magnetic field. It is generally quite a weak effect in most materials, although superconductors exhibit a strong effect.
A substance that is diamagnetic repels a magnetic field. All materials have diamagnetic properties, but the effect is very weak, and is usually overcome by the object's paramagnetic or ferromagnetic properties, which act in the opposite manner. Any material in which the diamagnetic component is stronger will be repelled by a magnet.
Diamagnetic levitation can be used to levitate very light pieces of pyrolytic graphite or bismuth above a moderately strong permanent magnet. As water is predominantly diamagnetic, this technique has been used to levitate water droplets and even live animals, such as a grasshopper, frog and a mouse.[15] However, the magnetic fields required for this are very high, typically in the range of 16 teslas, and therefore create significant problems if ferromagnetic materials are nearby. Operation of this electromagnet used in the frog levitation experiment required 4 MW (4000000 watts) of power.[15]:5
The minimum criterion for diamagnetic levitation is , where:
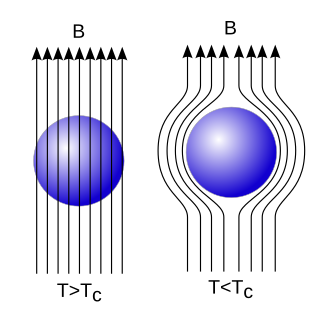
Superconductors may be considered perfect diamagnets, and completely expel magnetic fields due to the Meissner effect when the superconductivity initially forms; thus superconducting levitation can be considered a particular instance of diamagnetic levitation. In a type-II superconductor, the levitation of the magnet is further stabilized due to flux pinning within the superconductor; this tends to stop the superconductor from moving with respect to the magnetic field, even if the levitated system is inverted.
These principles are exploited by EDS (Electrodynamic Suspension), superconducting bearings, flywheels, etc.
A very strong magnetic field is required to levitate a train. The SCMaglev trains have superconducting magnetic coils, but the SCMaglev levitation is not due to the Meissner effect.
Rotational stabilization
A Levitron branded top demonstrates spin-stabilized magnetic levitation
A magnet or properly assembled array of magnets can be stably levitated against gravity when gyroscopically stabilized by spinning it in a toroidal field created by a base ring of magnet(s). However, this only works while the rate of precession is between both upper and lower critical thresholds—the region of stability is quite narrow both spatially and in the required rate of precession.
The first discovery of this phenomenon was by Roy M. Harrigan, a Vermont inventor who patented a levitation device in 1983 based upon it.[16] Several devices using rotational stabilization (such as the popular Levitron branded levitating top toy) have been developed citing this patent. Non-commercial devices have been created for university research laboratories, generally using magnets too powerful for safe public interaction.
Earnshaw's theory strictly only applies to static fields. Alternating magnetic fields, even purely alternating attractive fields,[17] can induce stability and confine a trajectory through a magnetic field to give a levitation effect.
This is used in particle accelerators to confine and lift charged particles, and has been proposed for maglev trains as well.[17]
Uses
Known uses of magnetic levitation include maglev trains, contactless melting, magnetic bearings, and for product display purposes. Moreover, recently magnetic levitation has been approached in the field of microbotics.
Maglev, or magnetic levitation, is a system of transportation that suspends, guides and propels vehicles, predominantly trains, using magnetic levitation from a very large number of magnets for lift and propulsion. This method has the potential to be faster, quieter and smoother than wheeledmass transit systems. The technology has the potential to exceed 6,400km/h (4,000mi/h) if deployed in an evacuated tunnel.[18] If not deployed in an evacuated tube the power needed for levitation is usually not a particularly large percentage and most of the power needed is used to overcome air drag, as with any other high speed train. Some maglev Hyperloop prototype vehicles are being developed as part of the Hyperloop pod competition in 2015–2016, and are expected to make initial test runs in an evacuated tube later in 2016.[19]
The highest recorded speed of a maglev train is 603 kilometers per hour (374.69mph), achieved in Japan on 21 April 2015; 28.2km/h faster than the conventional TGV speed record. Maglev trains exist and are planned across the world. Notable projects in Asia include Central Japan Railway Company's superconducting maglev train and Shanghai's maglev train, the oldest commercial maglev still in operation. Elsewhere, various projects have been considered across Europe and Northeast Maglev aims to overhaul North America's Northeast Corridor with JR Central's SCMaglev technology.
Electromagnetic levitation (EML), patented by Muck in 1923,[20] is one of the oldest levitation techniques used for containerless experiments.[21] The technique levitates objects using electromagnets. A typical EML coil has reversed winding of upper and lower sections energized by a radio frequency power supply.
Microbotics
In the field of microbotics, strategies which exploit magnetic levitation have been investigated. In particular, it has been demonstrated that through such a technique, control of multiple microscale-sized agents within a defined workspace can be achieved.[22] Several research studies report the realization of different custom setups to properly obtain the desired control of microrobots. In Philips laboratories in Hamburg a custom clinical scale system, integrating both permanent magnets and electromagnets, was used to perform magnetic levitation and 3D navigation of a single magnetic object.[23] Another research group integrated a higher number of electromagnets, thus more magnetic degrees of freedom, to achieve 3D independent control of multiple objects through magnetic levitation.[24]
DM3 System
Magnet dispositions in a magnetic levitation microrobot
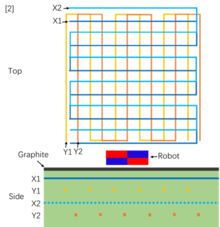
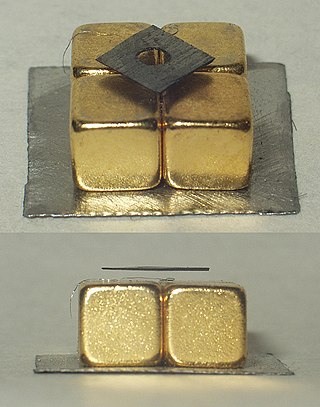
Microrobot involving magnetic levitation has been studied by SRI International (Stanford Research Institute) for many years.[25] This small-scale multi-agent robotic system is called the Diamagnetic Micro Manipulation or the DM3 system.[26][27][28] The DM3 contains a microrobot built with magnets that levitate and move on the surface of a PCB driving platform. The microrobot in this system was built with an array of NdFeB magnets shown in figure File:Microrobot Magnet Disposition.png. The dimension of magnets varies between different versions, while typically in the range of 1.4[27]-2[26] mm square shape with a lower height. The poles of magnets were positioned as a checkerboard array to fit the magnetic field generated by the PCB platform. The robot can be built in different size depending on the size of the array. Prototypes tested in SRI papers are mainly 2*2,[26][27][29] 3*3,[27] and 5*5[29] squares.
Schematics of a system used to levitate and control magnetic microrobots
The driving platform PCB was built with multiple layers of wire traces like a voice coil actuation. Shown in figure there are four layers of wires in the PCB board which represents two sets placed perpendicular to each other that stand for X and Y direction movement. From top to bottom, the order comes in XYXY that cross each other evenly and same axis were interlaced to control actuation. Since the force created by every layer must be the same on the circuit, deeper layers need higher current to transmit the same magnetic force to the robots on top. Set of currents with 0.25A, 0.33A, 0.5A, and 0.7A were used at SRI.[26] One square of the above 4-layer system acts as a zone on the driving platform.[27] This enables the circuit to control multiple robots in the same zone easily, but each robot cannot move separately. However, the platform can be divided into multiple zones which enable the separate control of robots in different zones.
Finally, a thin layer of pyrolytic graphite (500um) acts as diamagnetic layer, placed on the top to provide stable levitation. Thin copper (15um) placed above the graphite was used in earlier versions[26] of the system for eddy current damping.
2D Movement
Position transitions of a levitating microrobot using two pairs of serpentine traces
The basic system for 1DOF movement consists of two serpentine traces, individually actuated.[30][31] Figure shows the schematic of the trace paths and a 3x3 magnet microrobot on top. On position number 1, the magnets are in their equilibrium position where the magnetic flux density is the highest, in between two opposite currents from the same trace path.
On moving from 1 to 2, the first trace path is turned off while the second is turned on. This causes the magnets to move to their new equilibrium, toward the higher magnetic flux density.
Repeating this procedure with opposite currents on the same trace paths, a movement in the desired direction is produced.[32]
Magnetic flux vectors induced on a magnet cube over a pair of serpentine traces
To find the velocity, the forces on the microrobot must be analyzed (fig. ). The microrobot is supposed to levitate and so no friction forced is produced, other than the air drag which is also not considered.
The force produced by the interaction of the magnetic moments of the microrobot and the flux density of the serpentine traces is:
The magnetic moment vector, given the orientation requirement for the diamagnetic levitation, is:
Meanwhile, the contribution to the B field by the 2 closest traces is:
Since for this approximation is not dependent on y or z, their derivatives are zero and only force in the x direction is produced:
This is the only force applied on the magnet, and it can be equated to the robot's mass multiplied by its acceleration. This equation can be integrated to find the velocity of the microrobot:
Introducing the relation between magnet volume, mass, and density in the previous equation cancels out the mass, which means that if more magnets are added (N number of magnets), force will increase linearly:
This is the expression for the robot speed as a function of the current.
For a second DOF, more traces must be added. Two more intertwined serpentine traces must be added below the existing ones, rotated 90 degrees, to generate forces in the Y direction. Intensity on these traces will have to be higher to account for the higher distance.
Levitation
Diamagnetically levitated milli- and micro-robots can be controlled and moved with near-zero noise in their force, and they can be made intrinsically stable. In this way there is highly optimized control that uses zone or area control.[33]
Diamagnetic levitation can produce two effects on a micro robot. The first is reducing the sliding friction and the second is fully levitating the micro robot. The fully levitation system will be the focus. To produce passive levitation a diamagnetic layer (such as graphite) must exist in the presence of a ferromagnet (such as NdFeB).[34] Diamagnetic materials are characterized by having negative susceptibility, induced magnetic moment opposite to the external magnetic field. For that reason, they are repelled by an external magnetic field and tend to move toward the field minimum. This repulsive force is a result of the diamagnets having a magnetization direction antiparallel to the external magnetic fields.
The magnetizations of diamagnetic materials vary with an applied magnetic field which can be given as:
Where is the magnetic field strength and is the dimensionless susceptibility. For an object with volume , the induced magnetic moment m can be given by:
The magnetic force acting on the object is there for described as:
If the object has density and is levitating in a medium with density and magnetic susceptibility the total energy of the object, with a magnetic and gravitational term, is:
Such that the resulting force becomes:
The necessary condition for stability is:
To calculate the whole diamagnetic force acting on the levitated materials, each single dipole of the diamagnetic material must be considered. The diamagnetic force for the entire volume can be expressed as:
The diamagnetic repulsion force is proportional to the magnetic susceptibility of diamagnetic materials. To counteract gravity in the magnetic field, materials with strong diamagnetism and lightweight properties are preferred.
Historical beliefs
Legends of magnetic levitation were common in ancient and medieval times, and their spread from the Roman world to the Middle East and later to India has been documented by the classical scholar Dunstan Lowe.[35][36] The earliest known source is Pliny the Elder (first century AD), who described architectural plans for an iron statue that was to be suspended by lodestone from the vault of a temple in Alexandria. Many subsequent reports described levitating statues, relics or other objects of symbolic importance, and versions of the legend have appeared in diverse religious traditions, including Christianity, Islam, Buddhism, and Hinduism. In some cases they were interpreted as divine miracles, while in others they were described as natural phenomena falsely purported to be miraculous; one example of the latter comes from St Augustine, who refers to a magnetically suspended statue in his book The City of God (c.410 AD). Another common feature of these legends, according to Lowe, is an explanation of the object's disappearance, often involving its destruction by non-believers in acts of impiety. Although the phenomenon itself is now understood to be physically impossible, as was first recognized by Samuel Earnshaw in 1842, stories of magnetic levitation have persisted to modern times, one prominent example being the legend of the suspended monument in the Konark Sun Temple in Eastern India.
History
1839 Earnshaw's theorem showed electrostatic levitation cannot be stable; later theorem was extended to magnetostatic levitation by others
1913 Emile Bachelet awarded a patent in March 1912 for his "levitating transmitting apparatus" (patent no. 1,020,942) for electromagnetic suspension system
1981 First single-tether magnetic levitation system exhibited publicly (Tom Shannon, Compass of Love, collection Musee d'Art Moderne de la Ville de Paris)
1984 Low-speed maglev shuttle in Birmingham Eric Laithwaite and others
Diamagnetism is the property of materials that are repelled by a magnetic field; an applied magnetic field creates an induced magnetic field in them in the opposite direction, causing a repulsive force. In contrast, paramagnetic and ferromagnetic materials are attracted by a magnetic field. Diamagnetism is a quantum mechanical effect that occurs in all materials; when it is the only contribution to the magnetism, the material is called diamagnetic. In paramagnetic and ferromagnetic substances, the weak diamagnetic force is overcome by the attractive force of magnetic dipoles in the material. The magnetic permeability of diamagnetic materials is less than the permeability of vacuum, μ0. In most materials, diamagnetism is a weak effect which can be detected only by sensitive laboratory instruments, but a superconductor acts as a strong diamagnet because it entirely expels any magnetic field from its interior.
Magnetism is the class of physical attributes that occur through a magnetic field, which allows objects to attract or repel each other. Because both electric currents and magnetic moments of elementary particles give rise to a magnetic field, magnetism is one of two aspects of electromagnetism.
Paramagnetism is a form of magnetism whereby some materials are weakly attracted by an externally applied magnetic field, and form internal, induced magnetic fields in the direction of the applied magnetic field. In contrast with this behavior, diamagnetic materials are repelled by magnetic fields and form induced magnetic fields in the direction opposite to that of the applied magnetic field. Paramagnetic materials include most chemical elements and some compounds; they have a relative magnetic permeability slightly greater than 1 and hence are attracted to magnetic fields. The magnetic moment induced by the applied field is linear in the field strength and rather weak. It typically requires a sensitive analytical balance to detect the effect and modern measurements on paramagnetic materials are often conducted with a SQUID magnetometer.
A magnetic field is a vector field that describes the magnetic influence on moving electric charges, electric currents, and magnetic materials. A moving charge in a magnetic field experiences a force perpendicular to its own velocity and to the magnetic field. A permanent magnet's magnetic field pulls on ferromagnetic materials such as iron, and attracts or repels other magnets. In addition, a nonuniform magnetic field exerts minuscule forces on "nonmagnetic" materials by three other magnetic effects: paramagnetism, diamagnetism, and antiferromagnetism, although these forces are usually so small they can only be detected by laboratory equipment. Magnetic fields surround magnetized materials, electric currents, and electric fields varying in time. Since both strength and direction of a magnetic field may vary with location, it is described mathematically by a function assigning a vector to each point of space, called a vector field.
A magnet is a material or object that produces a magnetic field. This magnetic field is invisible but is responsible for the most notable property of a magnet: a force that pulls on other ferromagnetic materials, such as iron, steel, nickel, cobalt, etc. and attracts or repels other magnets.
The Meissner effect is the expulsion of a magnetic field from a superconductor during its transition to the superconducting state when it is cooled below the critical temperature. This expulsion will repel a nearby magnet.
In electromagnetism, the magnetic susceptibility is a measure of how much a material will become magnetized in an applied magnetic field. It is the ratio of magnetization M to the applied magnetizing field intensity H. This allows a simple classification, into two categories, of most materials' responses to an applied magnetic field: an alignment with the magnetic field, χ > 0, called paramagnetism, or an alignment against the field, χ < 0, called diamagnetism.
In electromagnetism, an eddy current is a loop of electric current induced within conductors by a changing magnetic field in the conductor according to Faraday's law of induction or by the relative motion of a conductor in a magnetic field. Eddy currents flow in closed loops within conductors, in planes perpendicular to the magnetic field. They can be induced within nearby stationary conductors by a time-varying magnetic field created by an AC electromagnet or transformer, for example, or by relative motion between a magnet and a nearby conductor. The magnitude of the current in a given loop is proportional to the strength of the magnetic field, the area of the loop, and the rate of change of flux, and inversely proportional to the resistivity of the material. When graphed, these circular currents within a piece of metal look vaguely like eddies or whirlpools in a liquid.
Earnshaw's theorem states that a collection of point charges cannot be maintained in a stable stationary equilibrium configuration solely by the electrostatic interaction of the charges. This was first proven by British mathematician Samuel Earnshaw in 1842. It is usually cited in reference to magnetic fields, but was first applied to electrostatic field.
Electrodynamic suspension (EDS) is a form of magnetic levitation in which there are conductors which are exposed to time-varying magnetic fields. This induces eddy currents in the conductors that creates a repulsive magnetic field which holds the two objects apart.
In electromagnetism, the magnetic moment or magnetic dipole moment is the combination of strength and orientation of a magnet or other object or system that exerts a magnetic field. The magnetic dipole moment of an object determines the magnitude of torque the object experiences in a given magnetic field. When the same magnetic field is applied, objects with larger magnetic moments experience larger torques. The strength of this torque depends not only on the magnitude of the magnetic moment but also on its orientation relative to the direction of the magnetic field. Its direction points from the south pole to north pole of the magnet.
Levitation is the process by which an object is held aloft in a stable position, without mechanical support via any physical contact.
In electromagnetism, permeability is the measure of magnetization produced in a material in response to an applied magnetic field. Permeability is typically represented by the (italicized) Greek letter μ. It is the ratio of the magnetic induction to the magnetizing field as a function of the field in a material. The term was coined by William Thomson, 1st Baron Kelvin in 1872, and used alongside permittivity by Oliver Heaviside in 1885. The reciprocal of permeability is magnetic reluctivity.
The tesla is the unit of magnetic flux density in the International System of Units (SI).
Superdiamagnetism is a phenomenon occurring in certain materials at low temperatures, characterised by the complete absence of magnetic permeability and the exclusion of the interior magnetic field.
Pyrolytic carbon is a material similar to graphite, but with some covalent bonding between its graphene sheets as a result of imperfections in its production.
Electromagnetic suspension (EMS) is the magnetic levitation of an object achieved by constantly altering the strength of a magnetic field produced by electromagnets using a feedback loop. In most cases the levitation effect is mostly due to permanent magnets as they have no power dissipation, with electromagnets only used to stabilise the effect.
In classical electromagnetism, magnetization is the vector field that expresses the density of permanent or induced magnetic dipole moments in a magnetic material. Accordingly, physicists and engineers usually define magnetization as the quantity of magnetic moment per unit volume. It is represented by a pseudovector M. Magnetization can be compared to electric polarization, which is the measure of the corresponding response of a material to an electric field in electrostatics.
Magnetic tweezers (MT) are scientific instruments for the manipulation and characterization of biomolecules or polymers. These apparatus exert forces and torques to individual molecules or groups of molecules. It can be used to measure the tensile strength or the force generated by molecules.
Flux pumping is a method for magnetising superconductors to fields in excess of 15 teslas. The method can be applied to any type II superconductor and exploits a fundamental property of superconductors, namely their ability to support and maintain currents on the length scale of the superconductor. Conventional magnetic materials are magnetised on a molecular scale which means that superconductors can maintain a flux density orders of magnitude bigger than conventional materials. Flux pumping is especially significant when one bears in mind that all other methods of magnetising superconductors require application of a magnetic flux density at least as high as the final required field. This is not true of flux pumping.
1 2 Hsu, Allen; Chu, William; Cowan, Cregg; McCoy, Brian; Wong-Foy, Annjoe; Pelrine, Ron; Lake, Joseph; Ballard, Joshua; Randall, John (2018-06-01). "Diamagnetically levitated Milli-robots for heterogeneous 3D assembly". Journal of Micro-Bio Robotics. 14 (1): 1–16. doi:10.1007/s12213-018-0103-4. ISSN2194-6426. S2CID255530844.
↑ Jiri, Kuthan; Frantisek, Mach (September 2017). "Magnetically guided actuation of ferromagnetic bodies on the planar surfaces: Numerical modeling and experimental verification". 18th International Conference on Computational Problems of Electrical Engineering. IEEE. doi:10.1109/cpee.2017.8093067.
↑ Wang, Jiasu; Wang Suyu; etal. (2002). "The first man-loading high temperature superconducting maglev test vehicle in the world". Physica C: Superconductivity and Its Applications. 378–381: 809–814. Bibcode:2002PhyC..378..809W. doi:10.1016/S0921-4534(02)01548-4.
Maglev Trains[permanent dead link] Audio slideshow from the National High Magnetic Field Laboratory discusses magnetic levitation, the Meissner Effect, magnetic flux trapping and superconductivity
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.

























































{kind=link}
{kind=link}