
The Woods Hole Oceanographic Institution is a private, nonprofit research and higher education facility dedicated to the study of marine science and engineering.

A remotely operated underwater vehicle (ROUV) or remotely operated vehicle (ROV) is a free-swimming submersible craft used to perform underwater observation, inspection and physical tasks such as valve operations, hydraulic functions and other general tasks within the subsea oil and gas industry, military, scientific and other applications. ROVs can also carry tooling packages for undertaking specific tasks such as pull-in and connection of flexible flowlines and umbilicals, and component replacement.

Stellamedusa is a genus of jellyfish. The genus is monotypic with a single species recognized, Stellamedusa ventana.

Kaikō was a remotely operated underwater vehicle (ROV) built by the Japan Agency for Marine-Earth Science and Technology (JAMSTEC) for exploration of the deep sea. Kaikō was the second of only five vessels ever to reach the bottom of the Challenger Deep, as of 2019. Between 1995 and 2003, this 10.6 ton unmanned submersible conducted more than 250 dives, collecting 350 biological species, some of which could prove to be useful in medical and industrial applications. On 29 May 2003, Kaikō was lost at sea off the coast of Shikoku Island during Typhoon Chan-Hom, when a secondary cable connecting it to its launcher at the ocean surface broke.

An autonomous underwater vehicle (AUV) is a robot that travels underwater without requiring continuous input from an operator. AUVs constitute part of a larger group of undersea systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated underwater vehicles (ROVs) – controlled and powered from the surface by an operator/pilot via an umbilical or using remote control. In military applications an AUV is more often referred to as an unmanned undersea vehicle (UUV). Underwater gliders are a subclass of AUVs.

Unmanned underwater vehicles (UUV), also known as uncrewed underwater vehicles and underwater drones, are submersible vehicles that can operate underwater without a human occupant. These vehicles may be divided into two categories: remotely operated underwater vehicles (ROUVs) and autonomous underwater vehicles (AUVs). ROUVs are remotely controlled by a human operator. AUVs are automated and operate independently of direct human input.

RV Western Flyer is a twin hulled SWATH research vessel operated by the Monterey Bay Aquarium Research Institute (MBARI). Its relatively stable SWATH design permits expanded operational capability in rough sea states. It is the platform of operations for the ROV Doc Ricketts. The vessel carries 10 crew, 5 ROV pilots, and 11 scientists, for a total complement of 26. Cruises generally center around the central California coast and Monterey Bay, although excursions further afield to Hawaii, the Pacific Northwest, and the Gulf of California have taken place in recent years.

Jason is a two-body remotely operated vehicle (ROV) designed, built, and operated by the National Deep Submergence Laboratory of the Woods Hole Oceanographic Institution (WHOI). Construction of Jason began in 1982 and was first launched in 1988, redesigned in 2002 as the second iteration of the ROV. The ROV allows scientists and explorers to have access to the seafloor without leaving the deck of a ship.

Tiburonia is a genus of jellyfish in the family Ulmaridae. It was reported in 2003, following the discovery of its only species yet identified, Tiburonia granrojo. It was discovered by a crew from MBARI led by George Matsumoto. Pieces of the medusae were collected for morphological analysis, which eventually led to sequencing and taxonomic identification. The discovery of this organism led to not only a new species, but a new subfamily of Ulmaridae, called Tiburoniinae. Its genus was named Tiburonia after the ROV the crew were using, called Tiburon, meaning "shark" in Spanish. Because of this ROVs distinct maneuverability, all angles of the organisms were able to be observed, which is particularly important to the study of gelatinous pelagic invertebrates. Its species name was originally to be called "big ugly", but Kirsten Matsumoto, George Matsumoto's wife, raised objections to this name, and renamed it granrojo, meaning "big red" in Spanish, leading to its English-language name, the Big Red Jellyfish.
Intervention AUV or I-AUV is a type of autonomous underwater vehicle. Its characteristic feature is that it is capable of autonomous interventions on the subsea installations, a task usually carried out by remotely operated underwater vehicles (ROVs) or human divers.

Nereus was a hybrid uncrewed autonomous underwater vehicle built by the Woods Hole Oceanographic Institution (WHOI). Constructed as a research vehicle to operate at depths of up to 11,000 metres (36,000 ft), it was designed to explore Challenger Deep, the deepest surveyed point in the global ocean. Nereus, named for Greek sea titan Nereus through a nationwide contest of high school and college students, began its deep sea voyage to Challenger Deep in May 2009 and reached the bottom on May 31, 2009.
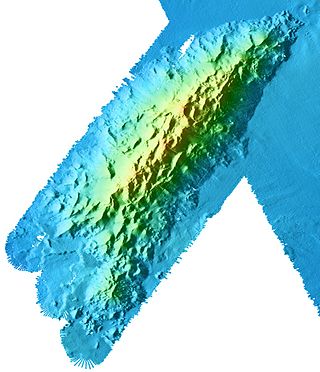
Davidson Seamount is a seamount located off the coast of Central California, 80 mi (129 km) southwest of Monterey and 75 mi (121 km) west of San Simeon. At 26 mi (42 km) long and 8 mi (13 km) wide, it is one of the largest known seamounts in the world. From base to crest, the seamount is 7,480 ft (2,280 m) tall, yet its summit is still 4,101 ft (1,250 m) below the sea surface. The seamount is biologically diverse, with 237 species and 27 types of deep-sea coral having been identified.
The National Institute for Undersea Science and Technology (NIUST) was established in 2002 within the National Oceanic and Atmospheric Administration (NOAA) for the purpose of advancing undersea research. NOAA's undersea research program is carried out through six regional research centers and a national institute based at academic institutions with established programs in marine science and technology.
The Chinese 8A4 class ROUV is a remotely operated underwater vehicle (ROUV) used to perform various underwater tasks, ranging from oil platform service to salvage and rescue missions. The 8A4 is a member of a series of related ROUVs developed by the Shenyang Institute of Automation (SIA) in the People's Republic of China (PRC). The predecessor to the 8A4 was the RECON-IV, an improved version of the American RECON-III. The 8A4 itself is an upgraded version of the American AMETEK 2006, and the 7B8 is an improved version of the 8A4.
ABISMO is a remotely operated underwater vehicle (ROV) built by the Japan Agency for Marine-Earth Science and Technology (JAMSTEC) for exploration of the deep sea. It is the only remaining ROV rated to 11,000-meters, ABISMO is intended to be the permanent replacement for Kaikō, a ROV that was lost at sea in 2003.

The Sentry is an autonomous underwater vehicle (AUV) made by the Woods Hole Oceanographic Institution. Sentry is designed to descend to depths of 6,000 metres (20,000 ft) and to carry a range of devices for taking samples, pictures and readings from the deep sea.

The Japan Agency for Marine-Earth Science and Technology, or JAMSTEC (海洋機構), is a Japanese national research institute for marine-earth science and technology. It was founded as Japan Marine Science and Technology Center (海洋科学技術センター) in October 1971, and became an Independent Administrative Institution administered by the Ministry of Education, Culture, Sports, Science and Technology (MEXT) in April 2004.
R/V Rachel Carson is a research vessel owned and operated by the Monterey Bay Aquarium Research Institute (MBARI), named in honor of the marine biologist and writer, Rachel Carson.
The Remote Operated Vehicle (ROV) SuBastian is owned and operated by the Schmidt Ocean Institute and is used for scientific exploration of the deep sea. ROV SuBastian is operated from the Schmidt Ocean Institute's research vessel RV Falkor and can reach depths up to 4,500m. The tethered robot has an array of scientific capability which includes:

Underwater exploration is the exploration of any underwater environment, either by direct observation by the explorer, or by remote observation and measurement under the direction of the investigators. Systematic, targeted exploration is the most effective method to increase understanding of the ocean and other underwater regions, so they can be effectively managed, conserved, regulated, and their resources discovered, accessed, and used. Less than 10% of the ocean has been mapped in any detail, less has been visually observed, and the total diversity of life and distribution of populations is similarly obscure.


