
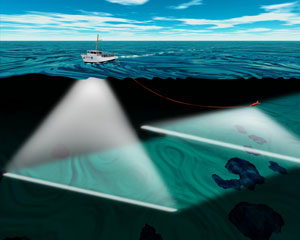
Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels.

Echo sounding or depth sounding is the use of sonar for ranging, normally to determine the depth of water (bathymetry). It involves transmitting acoustic waves into water and recording the time interval between emission and return of a pulse; the resulting time of flight, along with knowledge of the speed of sound in water, allows determining the distance between sonar and target. This information is then typically used for navigation purposes or in order to obtain depths for charting purposes.

Hydrographic survey is the science of measurement and description of features which affect maritime navigation, marine construction, dredging, offshore wind farms, offshore oil exploration and drilling and related activities. Surveys may also be conducted to determine the route of subsea cables such as telecommunications cables, cables associated with wind farms, and HVDC power cables. Strong emphasis is placed on soundings, shorelines, tides, currents, seabed and submerged obstructions that relate to the previously mentioned activities. The term hydrography is used synonymously to describe maritime cartography, which in the final stages of the hydrographic process uses the raw data collected through hydrographic survey into information usable by the end user.
Bathymetry is the study of underwater depth of ocean floors, lake floors, or river floors. In other words, bathymetry is the underwater equivalent to hypsometry or topography. The first recorded evidence of water depth measurements are from Ancient Egypt over 3000 years ago. Bathymetric charts, are typically produced to support safety of surface or sub-surface navigation, and usually show seafloor relief or terrain as contour lines and selected depths (soundings), and typically also provide surface navigational information. Bathymetric maps may also use a Digital Terrain Model and artificial illumination techniques to illustrate the depths being portrayed. The global bathymetry is sometimes combined with topography data to yield a global relief model. Paleobathymetry is the study of past underwater depths.

A fishfinder or sounder (Australia) is an instrument used to locate fish underwater by detecting reflected pulses of sound energy, as in sonar. A modern fishfinder displays measurements of reflected sound on a graphical display, allowing an operator to interpret information to locate schools of fish, underwater debris, and the bottom of a body of water. Fishfinder instruments are used both by sport and commercial fishermen. Modern electronics allow a high degree of integration between the fishfinder system, marine radar, compass and GPS navigation systems.
An acoustic doppler current profiler (ADCP) is a hydroacoustic current meter similar to a sonar, used to measure water current velocities over a depth range using the Doppler effect of sound waves scattered back from particles within the water column. The term ADCP is a generic term for all acoustic current profilers, although the abbreviation originates from an instrument series introduced by RD Instruments in the 1980s. The working frequencies range of ADCPs range from 38 kHz to several megahertz.

Marine salvage is the process of recovering a ship and its cargo after a shipwreck or other maritime casualty. Salvage may encompass towing, lifting a vessel, or effecting repairs to a ship. Protecting the coastal environment from oil spillages or other contaminants from a modern ship can also be a motivator, as oil, cargo, and other pollutants can easily leak from a wreck.

Sodar, an acronym of sonic detection and ranging, is a meteorological instrument used as a wind profiler based on the scattering of sound waves by atmospheric turbulence. Sodar equipment is used to measure wind speed at various heights above the ground, and the thermodynamic structure of the lower layer of the atmosphere.
Sound from ultrasound is the name given here to the generation of audible sound from modulated ultrasound without using an active receiver. This happens when the modulated ultrasound passes through a nonlinear medium which acts, intentionally or unintentionally, as a demodulator.

A multibeam echosounder (MBES) is a type of sonar that is used to map the seabed. It emits acoustic waves in a fan shape beneath its transceiver. The time it takes for the sound waves to reflect off the seabed and return to the receiver is used to calculate the water depth. Unlike other sonars and echo sounders, MBES uses beamforming to extract directional information from the returning soundwaves, producing a swathe of depth soundings from a single ping.

The AN/UQQ-2 Surveillance Towed Array Sensor System (SURTASS), colloquially referred to as the ship's "Tail", is a towed array sonar system of the United States Navy.

Underwater acoustics is the study of the propagation of sound in water and the interaction of the mechanical waves that constitute sound with the water, its contents and its boundaries. The water may be in the ocean, a lake, a river or a tank. Typical frequencies associated with underwater acoustics are between 10 Hz and 1 MHz. The propagation of sound in the ocean at frequencies lower than 10 Hz is usually not possible without penetrating deep into the seabed, whereas frequencies above 1 MHz are rarely used because they are absorbed very quickly.
Geophysical MASINT is a branch of Measurement and Signature Intelligence (MASINT) that involves phenomena transmitted through the earth and manmade structures including emitted or reflected sounds, pressure waves, vibrations, and magnetic field or ionosphere disturbances.

Salvage diving is the diving work associated with the recovery of all or part of ships, their cargoes, aircraft, and other vehicles and structures which have sunk or fallen into water. In the case of ships it may also refer to repair work done to make an abandoned or distressed but still floating vessel more suitable for towing or propulsion under its own power. The recreational/technical activity known as wreck diving is generally not considered salvage work, though some recovery of artifacts may be done by recreational divers.
Acoustic seabed classification is the partitioning of a seabed acoustic image into discrete physical entities or classes. This is a particularly active area of development in the field of seabed mapping, marine geophysics, underwater acoustics and benthic habitat mapping. Seabed classification is one route to characterizing the seabed and its habitats. Seabed characterization makes the link between the classified regions and the seabed physical, geological, chemical or biological properties. Acoustic seabed classification is possible using a wide range of acoustic imaging systems including multibeam echosounders, sidescan sonar, single-beam echosounders, interferometric systems and sub-bottom profilers. Seabed classification based on acoustic properties can be divided into two main categories; surficial seabed classification and sub-surface seabed classification. Sub-surface imaging technologies use lower frequency sound to provide higher penetration, whereas surficial imaging technologies provide higher resolution imagery by utilizing higher frequencies.
Fisheries acoustics includes a range of research and practical application topics using acoustical devices as sensors in aquatic environments. Acoustical techniques can be applied to sensing aquatic animals, zooplankton, and physical and biological habitat characteristics.
An underwater acoustic positioning system is a system for the tracking and navigation of underwater vehicles or divers by means of acoustic distance and/or direction measurements, and subsequent position triangulation. Underwater acoustic positioning systems are commonly used in a wide variety of underwater work, including oil and gas exploration, ocean sciences, salvage operations, marine archaeology, law enforcement and military activities.
Underwater searches are procedures to find a known or suspected target object or objects in a specified search area under water. They may be carried out underwater by divers, manned submersibles, remotely operated underwater vehicles, or autonomous underwater vehicles, or from the surface by other agents, including surface vessels, aircraft and cadaver dogs.

EVNautilus is a 68-meter (223 ft) research vessel owned by the Ocean Exploration Trust under the direction of Robert Ballard, the researcher known for finding the wreck of the Titanic and the German battleship Bismarck. The vessel's home port is at the AltaSea facility in San Pedro in the Port of Los Angeles, California. Nautilus is equipped with a team of remotely operated vehicles (ROVs), Hercules, Argus, Little Hercules, and Atalanta, a multibeam mapping system, and mapping tools Diana and Echo, allowing it to conduct deep sea exploration of the ocean to a depth of 4,000 meters (13,000 ft).
An underwater survey is a survey performed in an underwater environment or conducted remotely on an underwater object or region. Survey can have several meanings. The word originates in Medieval Latin with meanings of looking over and detailed study of a subject. One meaning is the accurate measurement of a geographical region, usually with the intention of plotting the positions of features as a scale map of the region. This meaning is often used in scientific contexts, and also in civil engineering and mineral extraction. Another meaning, often used in a civil, structural, or marine engineering context, is the inspection of a structure or vessel to compare actual condition with the specified nominal condition, usually with the purpose of reporting on the actual condition and compliance with, or deviations from, the nominal condition, for quality control, damage assessment, valuation, insurance, maintenance, and similar purposes. In other contexts it can mean inspection of a region to establish presence and distribution of specified content, such as living organisms, either to establish a baseline, or to compare with a baseline.




