In computing, a context switch is the process of storing the state of a process or thread, so that it can be restored and resume execution at a later point, and then restoring a different, previously saved, state. This allows multiple processes to share a single central processing unit (CPU), and is an essential feature of a multitasking operating system. In a traditional CPU, each process - a program in execution - utilizes the various CPU registers to store data and hold the current state of the running process. However, in a multitasking operating system, the operating system switches between processes or threads to allow the execution of multiple processes simultaneously. For every switch, the operating system must save the state of the currently running process, followed by loading the next process state, which will run on the CPU. This sequence of operations that stores the state of the running process and the loading of the following running process is called a context switch.

In digital computers, an interrupt is a request for the processor to interrupt currently executing code, so that the event can be processed in a timely manner. If the request is accepted, the processor will suspend its current activities, save its state, and execute a function called an interrupt handler to deal with the event. This interruption is often temporary, allowing the software to resume normal activities after the interrupt handler finishes, although the interrupt could instead indicate a fatal error.
Real mode, also called real address mode, is an operating mode of all x86-compatible CPUs. The mode gets its name from the fact that addresses in real mode always correspond to real locations in memory. Real mode is characterized by a 20-bit segmented memory address space and unlimited direct software access to all addressable memory, I/O addresses and peripheral hardware. Real mode provides no support for memory protection, multitasking, or code privilege levels.
x86 memory segmentation refers to the implementation of memory segmentation in the Intel x86 computer instruction set architecture. Segmentation was introduced on the Intel 8086 in 1978 as a way to allow programs to address more than 64 KB (65,536 bytes) of memory. The Intel 80286 introduced a second version of segmentation in 1982 that added support for virtual memory and memory protection. At this point the original mode was renamed to real mode, and the new version was named protected mode. The x86-64 architecture, introduced in 2003, has largely dropped support for segmentation in 64-bit mode.
In computing, protected mode, also called protected virtual address mode, is an operational mode of x86-compatible central processing units (CPUs). It allows system software to use features such as virtual memory, paging and safe multi-tasking designed to increase an operating system's control over application software.
x86 assembly language is the name for the family of assembly languages which provide some level of backward compatibility with CPUs back to the Intel 8008 microprocessor, which was launched in April 1972. It is used to produce object code for the x86 class of processors.
Memory protection is a way to control memory access rights on a computer, and is a part of most modern instruction set architectures and operating systems. The main purpose of memory protection is to prevent a process from accessing memory that has not been allocated to it. This prevents a bug or malware within a process from affecting other processes, or the operating system itself. Protection may encompass all accesses to a specified area of memory, write accesses, or attempts to execute the contents of the area. An attempt to access unauthorized memory results in a hardware fault, e.g., a segmentation fault, storage violation exception, generally causing abnormal termination of the offending process. Memory protection for computer security includes additional techniques such as address space layout randomization and executable space protection.

A general protection fault (GPF) in the x86 instruction set architectures (ISAs) is a fault initiated by ISA-defined protection mechanisms in response to an access violation caused by some running code, either in the kernel or a user program. The mechanism is first described in Intel manuals and datasheets for the Intel 80286 CPU, which was introduced in 1983; it is also described in section 9.8.13 in the Intel 80386 programmer's reference manual from 1986. A general protection fault is implemented as an interrupt. Some operating systems may also classify some exceptions not related to access violations, such as illegal opcode exceptions, as general protection faults, even though they have nothing to do with memory protection. If a CPU detects a protection violation, it stops executing the code and sends a GPF interrupt. In most cases, the operating system removes the failing process from the execution queue, signals the user, and continues executing other processes. If, however, the operating system fails to catch the general protection fault, i.e. another protection violation occurs before the operating system returns from the previous GPF interrupt, the CPU signals a double fault, stopping the operating system. If yet another failure occurs, the CPU is unable to recover; since 80286, the CPU enters a special halt state called "Shutdown", which can only be exited through a hardware reset. The IBM PC AT, the first PC-compatible system to contain an 80286, has hardware that detects the Shutdown state and automatically resets the CPU when it occurs. All descendants of the PC AT do the same, so in a PC, a triple fault causes an immediate system reset.
The x86 instruction set refers to the set of instructions that x86-compatible microprocessors support. The instructions are usually part of an executable program, often stored as a computer file and executed on the processor.
Signals are standardized messages sent to a running program to trigger specific behavior, such as quitting or error handling. They are a limited form of inter-process communication (IPC), typically used in Unix, Unix-like, and other POSIX-compliant operating systems.
x86 virtualization is the use of hardware-assisted virtualization capabilities on an x86/x86-64 CPU.
The Pentium F00F bug is a design flaw in the majority of Intel Pentium, Pentium MMX, and Pentium OverDrive processors. Discovered in 1997, it can result in the processor ceasing to function until the computer is physically rebooted. The bug has been circumvented through operating system updates.
On the x86 architecture, a double fault exception occurs if the processor encounters a problem while trying to service a pending interrupt or exception. An example situation when a double fault would occur is when an interrupt is triggered but the segment in which the interrupt handler resides is invalid. If the processor encounters a problem when calling the double fault handler, a triple fault is generated and the processor shuts down.
In computing, the reset vector is the default location a central processing unit will go to find the first instruction it will execute after a reset. The reset vector is a pointer or address, where the CPU should always begin as soon as it is able to execute instructions. The address is in a section of non-volatile memory initialized to contain instructions to start the operation of the CPU, as the first step in the process of booting the system containing the CPU.
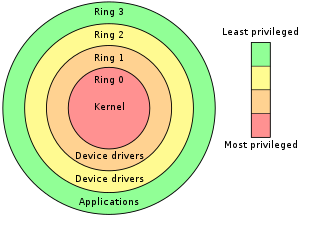
In computer science, hierarchical protection domains, often called protection rings, are mechanisms to protect data and functionality from faults and malicious behavior.
The interrupt descriptor table (IDT) is a data structure used by the x86 architecture to implement an interrupt vector table. The IDT is used by the processor to determine the correct response to interrupts and exceptions.
ntoskrnl.exe, also known as the kernel image, contains the kernel and executive layers of the Microsoft Windows NT kernel, and is responsible for hardware abstraction, process handling, and memory management. In addition to the kernel and executive mentioned earlier, it contains the cache manager, security reference monitor, memory manager, scheduler (Dispatcher), and blue screen of death.

An illegal opcode, also called an unimplemented operation, unintended opcode or undocumented instruction, is an instruction to a CPU that is not mentioned in any official documentation released by the CPU's designer or manufacturer, which nevertheless has an effect. Illegal opcodes were common on older CPUs designed during the 1970s, such as the MOS Technology 6502, Intel 8086, and the Zilog Z80. On these older processors, many exist as a side effect of the wiring of transistors in the CPU, and usually combine functions of the CPU that were not intended to be combined. On old and modern processors, there are also instructions intentionally included in the processor by the manufacturer, but that are not documented in any official specification.
On the x86 architecture, a debug register is a register used by a processor for program debugging. There are six debug registers, named DR0...DR7, with DR4 and DR5 as obsolete synonyms for DR6 and DR7. The debug registers allow programmers to selectively enable various debug conditions associated with a set of four debug addresses. Two of these registers are used to control debug features. These registers are accessed by variants of the MOV instruction. A debug register may be either the source operand or destination operand. The debug registers are privileged resources; the MOV instructions that access them can only be executed at privilege level zero. An attempt to read or write the debug registers when executing at any other privilege level causes a general protection fault.
The Interrupt flag (IF) is a flag bit in the CPU's FLAGS register, which determines whether or not the (CPU) will respond immediately to maskable hardware interrupts. If the flag is set to 1 maskable interrupts are enabled. If reset such interrupts will be disabled until interrupts are enabled. The Interrupt flag does not affect the handling of non-maskable interrupts (NMIs) or software interrupts generated by the INT instruction.