
JavaScript, often abbreviated as JS, is a programming language and core technology of the World Wide Web, alongside HTML and CSS. As of 2023, 98.7% of websites use JavaScript on the client side for webpage behavior, often incorporating third-party libraries. All major web browsers have a dedicated JavaScript engine to execute the code on users' devices.
Programming languages can be grouped by the number and types of paradigms supported.

Adobe ColdFusion is a commercial rapid web-application development computing platform created by J. J. Allaire in 1995. ColdFusion was originally designed to make it easier to connect simple HTML pages to a database. By version 2 (1996) it had become a full platform that included an IDE in addition to a full scripting language.
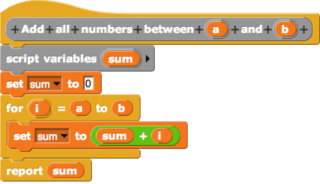
In computing, a visual programming language or block coding is a programming language that lets users create programs by manipulating program elements graphically rather than by specifying them textually. A VPL allows programming with visual expressions, spatial arrangements of text and graphic symbols, used either as elements of syntax or secondary notation. For example, many VPLs are based on the idea of "boxes and arrows", where boxes or other screen objects are treated as entities, connected by arrows, lines or arcs which represent relations.
In computer programming, dataflow programming is a programming paradigm that models a program as a directed graph of the data flowing between operations, thus implementing dataflow principles and architecture. Dataflow programming languages share some features of functional languages, and were generally developed in order to bring some functional concepts to a language more suitable for numeric processing. Some authors use the term datastream instead of dataflow to avoid confusion with dataflow computing or dataflow architecture, based on an indeterministic machine paradigm. Dataflow programming was pioneered by Jack Dennis and his graduate students at MIT in the 1960s.
Robot software is the set of coded commands or instructions that tell a mechanical device and electronic system, known together as a robot, what tasks to perform. Robot software is used to perform autonomous tasks. Many software systems and frameworks have been proposed to make programming robots easier.

Lego Mindstorms NXT is a programmable robotics kit released by Lego on August 2, 2006. It replaced the Robotics Invention System, the first-generation Lego Mindstorms kit. The base kit ships in two versions: the retail version and the education base set. It comes with the NXT-G programming software or the optional LabVIEW for Lego Mindstorms. A variety of unofficial languages exist, such as NXC, NBC, leJOS NXJ, and RobotC. A second-generation set, Lego Mindstorms NXT 2.0, was released on August 1, 2009, with a color sensor and other upgrades. The third-generation EV3 was released in September 2013.
TypeScript is a free and open-source high-level programming language developed by Microsoft that adds static typing with optional type annotations to JavaScript. It is designed for the development of large applications and transpiles to JavaScript. Because TypeScript is a superset of JavaScript, all JavaScript programs are syntactically valid TypeScript, but they can fail to type-check for safety reasons.
PureMVC is a software framework for creating applications based on the well-established model–view–controller (MVC) design pattern. It was originally implemented in the ActionScript 3 language for use with Adobe Flex, Flash, and AIR, and it has since been ported to nearly all major web development platforms. It is free and open-source software released under a BSD 3-clause license.
Domain-driven design (DDD) is a major software design approach, focusing on modeling software to match a domain according to input from that domain's experts.
In computer science, marshalling or marshaling is the process of transforming the memory representation of an object into a data format suitable for storage or transmission, especially between different runtimes. It is typically used when data must be moved between different parts of a computer program or from one program to another.

Clojure is a dynamic and functional dialect of the Lisp programming language on the Java platform.
Robotics middleware is middleware to be used in complex robot control software systems.
ZK is an open-source Ajax Web application framework, written in Java, that enables creation of graphical user interfaces for Web applications with little required programming knowledge.

Vaadin is an open-source web application development platform for Java. Vaadin includes a set of Web Components, a Java web framework, and a set of tools that enable developers to implement modern web graphical user interfaces (GUI) using the Java programming language only, TypeScript only, or a combination of both.

Node.js is a cross-platform, open-source JavaScript runtime environment that can run on Windows, Linux, Unix, macOS, and more. Node.js runs on the V8 JavaScript engine, and executes JavaScript code outside a web browser.
Cucumber is a software tool that supports behavior-driven development (BDD). Central to the Cucumber BDD approach is its ordinary language parser called Gherkin. It allows expected software behaviors to be specified in a logical language that customers can understand. As such, Cucumber allows the execution of feature documentation written in business-facing text. It is often used for testing other software. It runs automated acceptance tests written in a behavior-driven development (BDD) style.
urbiscript is a programming language for robotics. It features syntactic support for concurrency and event-based programming. It is a prototype-based object-oriented scripting language. It is dynamic: name resolution is performed during the program execution ; slots can be added/removed at runtime, and even prototypes (superclasses) of an object can be changed at runtime.
Jean-Christophe Baillie is a French scientist and entrepreneur. He founded the ENSTA ParisTech Robotics Lab where he worked on developmental robotics and computational evolutionary linguistics. While at ENSTA, he designed the urbiscript programming language to control robots, which became the base technology of Gostai, a robotics startup he created in 2006, which was acquired by Aldebaran Robotics in 2012.