Related Research Articles
In statistics, a central tendency is a central or typical value for a probability distribution.

The travelling salesman problem, also known as the travelling salesperson problem (TSP), asks the following question: "Given a list of cities and the distances between each pair of cities, what is the shortest possible route that visits each city exactly once and returns to the origin city?" It is an NP-hard problem in combinatorial optimization, important in theoretical computer science and operations research.

In mathematics, the Euclidean distance between two points in Euclidean space is the length of the line segment between them. It can be calculated from the Cartesian coordinates of the points using the Pythagorean theorem, and therefore is occasionally called the Pythagorean distance.

In combinatorial mathematics, the Steiner tree problem, or minimum Steiner tree problem, named after Jakob Steiner, is an umbrella term for a class of problems in combinatorial optimization. While Steiner tree problems may be formulated in a number of settings, they all require an optimal interconnect for a given set of objects and a predefined objective function. One well-known variant, which is often used synonymously with the term Steiner tree problem, is the Steiner tree problem in graphs. Given an undirected graph with non-negative edge weights and a subset of vertices, usually referred to as terminals, the Steiner tree problem in graphs requires a tree of minimum weight that contains all terminals and minimizes the total weight of its edges. Further well-known variants are the Euclidean Steiner tree problem and the rectilinear minimum Steiner tree problem.

Carl David Alfred Weber was a German economist, geographer, sociologist and theoretician of culture whose work was influential in the development of modern economic geography.

A Euclidean minimum spanning tree of a finite set of points in the Euclidean plane or higher-dimensional Euclidean space connects the points by a system of line segments with the points as endpoints, minimizing the total length of the segments. In it, any two points can reach each other along a path through the line segments. It can be found as the minimum spanning tree of a complete graph with the points as vertices and the Euclidean distances between points as edge weights.
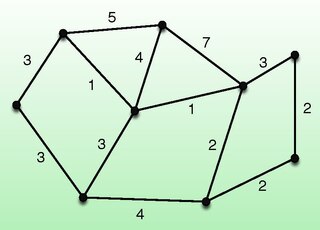
The k-minimum spanning tree problem, studied in theoretical computer science, asks for a tree of minimum cost that has exactly k vertices and forms a subgraph of a larger graph. It is also called the k-MST or edge-weighted k-cardinality tree. Finding this tree is NP-hard, but it can be approximated to within a constant approximation ratio in polynomial time.
k-means clustering is a method of vector quantization, originally from signal processing, that aims to partition n observations into k clusters in which each observation belongs to the cluster with the nearest mean, serving as a prototype of the cluster. This results in a partitioning of the data space into Voronoi cells. k-means clustering minimizes within-cluster variances, but not regular Euclidean distances, which would be the more difficult Weber problem: the mean optimizes squared errors, whereas only the geometric median minimizes Euclidean distances. For instance, better Euclidean solutions can be found using k-medians and k-medoids.

In electrical engineering and computer science, Lloyd's algorithm, also known as Voronoi iteration or relaxation, is an algorithm named after Stuart P. Lloyd for finding evenly spaced sets of points in subsets of Euclidean spaces and partitions of these subsets into well-shaped and uniformly sized convex cells. Like the closely related k-means clustering algorithm, it repeatedly finds the centroid of each set in the partition and then re-partitions the input according to which of these centroids is closest. In this setting, the mean operation is an integral over a region of space, and the nearest centroid operation results in Voronoi diagrams.

In graph theory, a minimum cut or min-cut of a graph is a cut that is minimal in some metric.
The k-medoids problem is a clustering problem similar to k-means. The name was coined by Leonard Kaufman and Peter J. Rousseeuw with their PAM algorithm. Both the k-means and k-medoids algorithms are partitional and attempt to minimize the distance between points labeled to be in a cluster and a point designated as the center of that cluster. In contrast to the k-means algorithm, k-medoids chooses actual data points as centers, and thereby allows for greater interpretability of the cluster centers than in k-means, where the center of a cluster is not necessarily one of the input data points. Furthermore, k-medoids can be used with arbitrary dissimilarity measures, whereas k-means generally requires Euclidean distance for efficient solutions. Because k-medoids minimizes a sum of pairwise dissimilarities instead of a sum of squared Euclidean distances, it is more robust to noise and outliers than k-means.

In geometry, the geometric median of a discrete set of sample points in a Euclidean space is the point minimizing the sum of distances to the sample points. This generalizes the median, which has the property of minimizing the sum of distances for one-dimensional data, and provides a central tendency in higher dimensions. It is also known as the spatial median, Euclidean minisum point, Torricelli point, or 1-median.
The study of facility location problems (FLP), also known as location analysis, is a branch of operations research and computational geometry concerned with the optimal placement of facilities to minimize transportation costs while considering factors like avoiding placing hazardous materials near housing, and competitors' facilities. The techniques also apply to cluster analysis.

The Euclidean shortest path problem is a problem in computational geometry: given a set of polyhedral obstacles in a Euclidean space, and two points, find the shortest path between the points that does not intersect any of the obstacles.
Arc routing problems (ARP) are a category of general routing problems (GRP), which also includes node routing problems (NRP). The objective in ARPs and NRPs is to traverse the edges and nodes of a graph, respectively. The objective of arc routing problems involves minimizing the total distance and time, which often involves minimizing deadheading time, the time it takes to reach a destination. Arc routing problems can be applied to garbage collection, school bus route planning, package and newspaper delivery, deicing and snow removal with winter service vehicles that sprinkle salt on the road, mail delivery, network maintenance, street sweeping, police and security guard patrolling, and snow ploughing. Arc routings problems are NP hard, as opposed to route inspection problems that can be solved in polynomial-time.
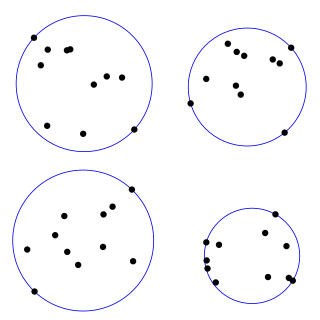
The smallest-circle problem is a computational geometry problem of computing the smallest circle that contains all of a given set of points in the Euclidean plane. The corresponding problem in n-dimensional space, the smallest bounding sphere problem, is to compute the smallest n-sphere that contains all of a given set of points. The smallest-circle problem was initially proposed by the English mathematician James Joseph Sylvester in 1857.

In graph algorithms, the widest path problem is the problem of finding a path between two designated vertices in a weighted graph, maximizing the weight of the minimum-weight edge in the path. The widest path problem is also known as the maximum capacity path problem. It is possible to adapt most shortest path algorithms to compute widest paths, by modifying them to use the bottleneck distance instead of path length. However, in many cases even faster algorithms are possible.
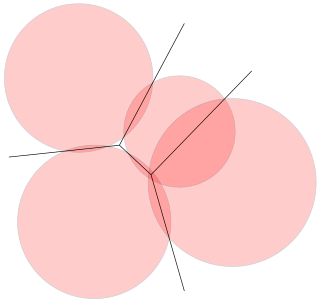
In computational geometry, a power diagram, also called a Laguerre–Voronoi diagram, Dirichlet cell complex, radical Voronoi tesselation or a sectional Dirichlet tesselation, is a partition of the Euclidean plane into polygonal cells defined from a set of circles. The cell for a given circle C consists of all the points for which the power distance to C is smaller than the power distance to the other circles. The power diagram is a form of generalized Voronoi diagram, and coincides with the Voronoi diagram of the circle centers in the case that all the circles have equal radii.

In computational geometry, the farthest-first traversal of a compact metric space is a sequence of points in the space, where the first point is selected arbitrarily and each successive point is as far as possible from the set of previously-selected points. The same concept can also be applied to a finite set of geometric points, by restricting the selected points to belong to the set or equivalently by considering the finite metric space generated by these points. For a finite metric space or finite set of geometric points, the resulting sequence forms a permutation of the points, also known as the greedy permutation.
The stretch factor (i.e., bilipschitz constant) of an embedding measures the factor by which the embedding distorts distances. Suppose that one metric space S is embedded into another metric space T by a metric map, a continuous one-to-one function f that preserves or reduces the distance between every pair of points. Then the embedding gives rise to two different notions of distance between pairs of points in S. Any pair of points (x,y) in S has both an intrinsic distance, the distance from x to y in S, and a smaller extrinsic distance, the distance from f(x) to f(y) in T. The stretch factor of the pair is the ratio between these two distances, d(f(x),f(y))/d(x,y). The stretch factor of the whole mapping is the supremum of the stretch factors of all pairs of points. The stretch factor has also been called the distortion or dilation of the mapping.
References
- Megiddo, Nimrod (November 1983). "The weighted Euclidean 1-center problem" (PDF). Mathematics of Operations Research . 8 (4): 498–504. doi:10.1287/moor.8.4.498.
- Foul, Abdelaziz (May 2006). "A 1-center problem on the plane with uniformly distributed demand points". Operations Research Letters . 34 (3). Elsevier: 264–268. doi:10.1016/j.orl.2005.04.011.
- Chandrasekaran, R. (July 1982). "The weighted euclidean 1-center problem". Operations Research Letters . 1 (3). Elsevier: 111–112. doi:10.1016/0167-6377(82)90009-8.
- Colebrook, M.; J. Gutiérrez, S. Alonso; J. Sicilia (December 2002). "A New Algorithm for the Undesirable 1-Center Problem on Networks". Journal of the Operational Research Society . 53 (12). Palgrave Macmillan Journals: 1357–1366. doi:10.1057/palgrave.jors.2601468. JSTOR 822725.
- Burkard, Rainer E.; Helidon Dollani (February 2002). "A Note on the Robust 1-Center Problem on Trees". Annals of Operations Research. 110 (1–4). Kluwer Academic Publishers: 69–82. doi:10.1023/A:1020711416254. ISSN 1572-9338.