The Ford–Fulkerson method or Ford–Fulkerson algorithm (FFA) is a greedy algorithm that computes the maximum flow in a flow network. It is sometimes called a "method" instead of an "algorithm" as the approach to finding augmenting paths in a residual graph is not fully specified or it is specified in several implementations with different running times. It was published in 1956 by L. R. Ford Jr. and D. R. Fulkerson. The name "Ford–Fulkerson" is often also used for the Edmonds–Karp algorithm, which is a fully defined implementation of the Ford–Fulkerson method.

Breadth-first search (BFS) is an algorithm for searching a tree data structure for a node that satisfies a given property. It starts at the tree root and explores all nodes at the present depth prior to moving on to the nodes at the next depth level. Extra memory, usually a queue, is needed to keep track of the child nodes that were encountered but not yet explored.

In mathematics, a hypergraph is a generalization of a graph in which an edge can join any number of vertices. In contrast, in an ordinary graph, an edge connects exactly two vertices.

In the mathematical field of graph theory, a bipartite graph is a graph whose vertices can be divided into two disjoint and independent sets and , that is, every edge connects a vertex in to one in . Vertex sets and are usually called the parts of the graph. Equivalently, a bipartite graph is a graph that does not contain any odd-length cycles.

In optimization theory, maximum flow problems involve finding a feasible flow through a flow network that obtains the maximum possible flow rate.
In computer science, a topological sort or topological ordering of a directed graph is a linear ordering of its vertices such that for every directed edge (u,v) from vertex u to vertex v, u comes before v in the ordering. For instance, the vertices of the graph may represent tasks to be performed, and the edges may represent constraints that one task must be performed before another; in this application, a topological ordering is just a valid sequence for the tasks. Precisely, a topological sort is a graph traversal in which each node v is visited only after all its dependencies are visited. A topological ordering is possible if and only if the graph has no directed cycles, that is, if it is a directed acyclic graph (DAG). Any DAG has at least one topological ordering, and algorithms are known for constructing a topological ordering of any DAG in linear time. Topological sorting has many applications, especially in ranking problems such as feedback arc set. Topological sorting is possible even when the DAG has disconnected components.
In combinatorial mathematics, the Prüfer sequence of a labeled tree is a unique sequence associated with the tree. The sequence for a tree on n vertices has length n − 2, and can be generated by a simple iterative algorithm. Prüfer sequences were first used by Heinz Prüfer to prove Cayley's formula in 1918.
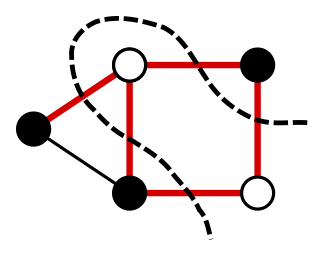
In graph theory, a domatic partition of a graph is a partition of into disjoint sets , ,..., such that each Vi is a dominating set for G. The figure on the right shows a domatic partition of a graph; here the dominating set consists of the yellow vertices, consists of the green vertices, and consists of the blue vertices.

In graph theory, a maximal independent set (MIS) or maximal stable set is an independent set that is not a subset of any other independent set. In other words, there is no vertex outside the independent set that may join it because it is maximal with respect to the independent set property.
In mathematical optimization, the push–relabel algorithm is an algorithm for computing maximum flows in a flow network. The name "push–relabel" comes from the two basic operations used in the algorithm. Throughout its execution, the algorithm maintains a "preflow" and gradually converts it into a maximum flow by moving flow locally between neighboring nodes using push operations under the guidance of an admissible network maintained by relabel operations. In comparison, the Ford–Fulkerson algorithm performs global augmentations that send flow following paths from the source all the way to the sink.
In computer science, the Hopcroft–Karp algorithm is an algorithm that takes a bipartite graph as input and produces a maximum-cardinality matching as output — a set of as many edges as possible with the property that no two edges share an endpoint. It runs in time in the worst case, where is set of edges in the graph, is set of vertices of the graph, and it is assumed that . In the case of dense graphs the time bound becomes , and for sparse random graphs it runs in time with high probability.

The distributed minimum spanning tree (MST) problem involves the construction of a minimum spanning tree by a distributed algorithm, in a network where nodes communicate by message passing. It is radically different from the classical sequential problem, although the most basic approach resembles Borůvka's algorithm. One important application of this problem is to find a tree that can be used for broadcasting. In particular, if the cost for a message to pass through an edge in a graph is significant, an MST can minimize the total cost for a source process to communicate with all the other processes in the network.
In distributed computing, leader election is the process of designating a single process as the organizer of some task distributed among several computers (nodes). Before the task has begun, all network nodes are either unaware which node will serve as the "leader" of the task, or unable to communicate with the current coordinator. After a leader election algorithm has been run, however, each node throughout the network recognizes a particular, unique node as the task leader.
In a graph, a maximum cut is a cut whose size is at least the size of any other cut. That is, it is a partition of the graph's vertices into two complementary sets S and T, such that the number of edges between S and T is as large as possible. Finding such a cut is known as the max-cut problem.
In the mathematical fields of graph theory and combinatorial optimization, the bipartite dimension or biclique cover number of a graph G = (V, E) is the minimum number of bicliques (that is complete bipartite subgraphs), needed to cover all edges in E. A collection of bicliques covering all edges in G is called a biclique edge cover, or sometimes biclique cover. The bipartite dimension of G is often denoted by the symbol d(G).

David Bernard Shmoys is a Professor in the School of Operations Research and Information Engineering and the Department of Computer Science at Cornell University. He obtained his Ph.D. from the University of California, Berkeley in 1984. His major focus has been in the design and analysis of algorithms for discrete optimization problems.
In mathematics and computer science, graph edit distance (GED) is a measure of similarity between two graphs. The concept of graph edit distance was first formalized mathematically by Alberto Sanfeliu and King-Sun Fu in 1983. A major application of graph edit distance is in inexact graph matching, such as error-tolerant pattern recognition in machine learning.
Yo-Yo is a distributed algorithm aimed at minimum finding and leader election in generic connected undirected graph. Unlike Mega-Merger it has a trivial termination and cost analysis.

In graph theory, an odd cycle transversal of an undirected graph is a set of vertices of the graph that has a nonempty intersection with every odd cycle in the graph. Removing the vertices of an odd cycle transversal from a graph leaves a bipartite graph as the remaining induced subgraph.
DSatur is a graph colouring algorithm put forward by Daniel Brélaz in 1979. Similarly to the greedy colouring algorithm, DSatur colours the vertices of a graph one after another, adding a previously unused colour when needed. Once a new vertex has been coloured, the algorithm determines which of the remaining uncoloured vertices has the highest number of colours in its neighbourhood and colours this vertex next. Brélaz defines this number as the degree of saturation of a given vertex. The contraction of the term "degree of saturation" forms the name of the algorithm. DSatur is a heuristic graph colouring algorithm, yet produces exact results for bipartite, cycle, and wheel graphs. DSatur has also been referred to as saturation LF in the literature.










