
Mars Pathfinder is an American robotic spacecraft that landed a base station with a roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight, 10.6 kg (23 lb) wheeled robotic Mars rover named Sojourner, the first rover to operate outside the Earth–Moon system.

Uncrewed spacecraft or robotic spacecraft are spacecraft without people on board. Uncrewed spacecraft may have varying levels of autonomy from human input, such as remote control, or remote guidance. They may also be autonomous, in which they have a pre-programmed list of operations that will be executed unless otherwise instructed. A robotic spacecraft for scientific measurements is often called a space probe or space observatory.

NASA's Mars Exploration Rover (MER) mission was a robotic space mission involving two Mars rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the launch of the two rovers to explore the Martian surface and geology; both landed on Mars at separate locations in January 2004. Both rovers far outlived their planned missions of 90 Martian solar days: MER-A Spirit was active until March 22, 2010, while MER-B Opportunity was active until June 10, 2018.

Spirit, also known as MER-A or MER-2, is a Mars robotic rover, active from 2004 to 2010. Spirit was operational on Mars for 2208 sols or 3.3 Martian years. It was one of two rovers of NASA's Mars Exploration Rover Mission managed by the Jet Propulsion Laboratory (JPL). Spirit landed successfully within the impact crater Gusev on Mars at 04:35 Ground UTC on January 4, 2004, three weeks before its twin, Opportunity (MER-B), which landed on the other side of the planet. Its name was chosen through a NASA-sponsored student essay competition. The rover got stuck in a "sand trap" in late 2009 at an angle that hampered recharging of its batteries; its last communication with Earth was on March 22, 2010.
Opportunity, also known as MER-B or MER-1, is a robotic rover that was active on Mars from 2004 until 2018. Opportunity was operational on Mars for 5111 sols. Launched on July 7, 2003, as part of NASA's Mars Exploration Rover program, it landed in Meridiani Planum on January 25, 2004, three weeks after its twin, Spirit (MER-A), touched down on the other side of the planet. With a planned 90-sol duration of activity, Spirit functioned until it got stuck in 2009 and ceased communications in 2010, while Opportunity was able to stay operational for 5111 sols after landing, maintaining its power and key systems through continual recharging of its batteries using solar power, and hibernating during events such as dust storms to save power. This careful operation allowed Opportunity to operate for 57 times its designed lifespan, exceeding the initial plan by 14 years, 47 days. By June 10, 2018, when it last contacted NASA, the rover had traveled a distance of 45.16 kilometers.

A Mars rover is a remote-controlled motor vehicle designed to travel on the surface of Mars. Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months, and they can advance the knowledge of how to perform very remote robotic vehicle control. They serve a different purpose than orbital spacecraft like Mars Reconnaissance Orbiter. A more recent development is the Mars helicopter.

The Mars Surveyor 2001 project was a multi-part Mars exploration mission intended as a follow-up to Mars Surveyor '98. After the two probes of the 1998 project, Mars Climate Orbiter and Mars Polar Lander, were both lost, NASA's "better, faster, cheaper" exploration philosophy was re-evaluated, with a particular eye on the two 2001 project probes. As a result, the mission, along with the launch of its lander and rover, were canceled in May 2000, but the decision was made to continue development with its orbiter counterpart. The orbiter launched as 2001 Mars Odyssey in April 2001, in a mission independent of the Mars Surveyor project, and reached Mars in October 2001. After being placed in a cleanroom in 2001 and stored since, the nearly-completed lander component was eventually reused to fly the Phoenix mission, which launched in August 2007 and landed successfully on Mars in May 2008.
Steven Weldon Squyres is an American geologist and planetary scientist. He was the James A. Weeks Professor of Physical Sciences at Cornell University in Ithaca, New York. His research area is in planetary sciences, with a focus on large solid bodies in the Solar System such as the terrestrial planets and the moons of the Jovian planets. Squyres was the principal investigator of the Mars Exploration Rover Mission (MER).

The rocker-bogie system is the suspension arrangement developed in 1988 for use in NASA's Mars rover Sojourner, and which has since become NASA's favored design for rovers. It has been used in the 2003 Mars Exploration Rover mission robots Spirit and Opportunity, on the 2012 Mars Science Laboratory (MSL) mission's rover Curiosity, the Mars 2020 rover Perseverance and ISRO's Chandrayaan-3 rover Pragyan in 2023.

A rover is a planetary surface exploration device designed to move over the rough surface of a planet or other planetary mass celestial bodies. Some rovers have been designed as land vehicles to transport members of a human spaceflight crew; others have been partially or fully autonomous robots. Rovers are typically created to land on another planet via a lander-style spacecraft, tasked to collect information about the terrain, and to take crust samples such as dust, soil, rocks, and even liquids. They are essential tools in space exploration.

NASA's Desert Research and Technology Studies is a group of teams which perform an annual series of field trials seeking to demonstrate and test candidate technologies and systems for human exploration of the surface of the Moon, Mars, or other rocky bodies.

A Mars landing is a landing of a spacecraft on the surface of Mars. Of multiple attempted Mars landings by robotic, uncrewed spacecraft, ten have had successful soft landings. There have also been studies for a possible human mission to Mars including a landing, but none have been attempted.
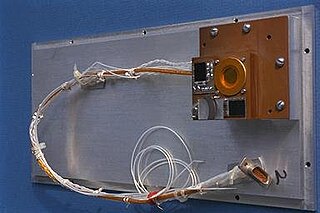
The Materials Adherence Experiment (MAE) was a material science experiment conducted between July 4, 1997 and August 12, 1997 during NASA's Mars Pathfinder mission. This was a joint experiment between NASA and the Jet Propulsion Laboratory at the California Institute of Technology that consisted of a small module mounted to Pathfinder's rover Sojourner that examined the effects of Martian surface dust on solar cells.
Curiosity is a car-sized Mars rover exploring Gale crater and Mount Sharp on Mars as part of NASA's Mars Science Laboratory (MSL) mission. Curiosity was launched from Cape Canaveral (CCAFS) on November 26, 2011, at 15:02:00 UTC and landed on Aeolis Palus inside Gale crater on Mars on August 6, 2012, 05:17:57 UTC. The Bradbury Landing site was less than 2.4 km (1.5 mi) from the center of the rover's touchdown target after a 560 million km (350 million mi) journey.
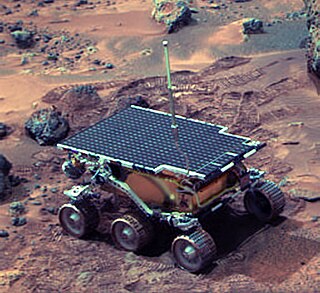
Sojourner is a robotic Mars rover that landed in the Ares Vallis channel in the Chryse Planitia region of the Oxia Palus quadrangle on July 4, 1997. Sojourner was operational on Mars for 92 sols. It was the first wheeled vehicle to rove on a planet other than Earth and formed part of the Mars Pathfinder mission.
Ashitey Trebi-Ollennu, is a Ghanaian robotics engineer at the National Aeronautics and Space Administration (NASA) and the chief engineer and technical group leader for the mobility and manipulation group at the Jet Propulsion Laboratory He has been associated with various NASA Mars missions, notably the Mars Rover and InSight projects.

Vandana "Vandi" Verma is a space roboticist and chief engineer at NASA's Jet Propulsion Laboratory, known for driving the Mars rovers, notably Curiosity and Perseverance, using software including PLEXIL programming technology that she co-wrote and developed.
Swati Mohan is an Indian-American aerospace engineer and was the Guidance and Controls Operations Lead on the NASA Mars 2020 mission.

PrOP-M were two Soviet Mars rovers that were launched on the unsuccessful Mars 2 and Mars 3 missions in 1971. PrOP-M were the first rovers to be launched to Mars, 26 years before the first successful rover mission of NASA's Sojourner in 1997. Because the Mars 2 and Mars 3 missions failed, the existence of the rovers was kept secret for nearly 20 years.
