A multistatic radar system contains multiple spatially diverse monostatic radar or bistatic radar components with a shared area of coverage. An important distinction of systems based on these individual radar geometries is the added requirement for some level of data fusion to take place between component parts. The spatial diversity afforded by multistatic systems allows different aspects of a target to be viewed simultaneously. The potential for information gain can give rise to a number of advantages over conventional systems.

Stealth technology, also termed low observable technology, is a sub-discipline of military tactics and passive and active electronic countermeasures, which covers a range of techniques used to make personnel, aircraft, ships, submarines, missiles, satellites and ground vehicles less visible to radar, infrared, sonar and other detection methods. It corresponds to military camouflage for these parts of the electromagnetic spectrum.
A continuous wave or continuous waveform (CW) is an electromagnetic wave of constant amplitude and frequency, almost always a sine wave, that for mathematical analysis is considered to be of infinite duration. Continuous wave is also the name given to an early method of radio transmission, in which a sinusoidal carrier wave is switched on and off. Information is carried in the varying duration of the on and off periods of the signal, for example by Morse code in early radio. In early wireless telegraphy radio transmission, CW waves were also known as "undamped waves", to distinguish this method from damped wave signals produced by earlier spark gap type transmitters.
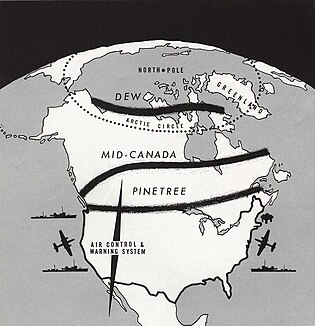
The Mid-Canada Line (MCL), also known as the McGill Fence, was a line of radar stations running east-west across the middle of Canada, used to provide early warning of a Soviet bomber attack on North America. It was built to supplement the less-advanced Pinetree Line, which was located further south. The majority of Mid-Canada Line stations were used only briefly from the late 1950s to the mid-1960s, as the attack threat changed from bombers to ICBMs. As the MCL was closed down, the early warning role passed almost entirely to the more capable DEW Line further north.

Weather radar, also called weather surveillance radar (WSR) and Doppler weather radar, is a type of radar used to locate precipitation, calculate its motion, and estimate its type. Modern weather radars are mostly pulse-Doppler radars, capable of detecting the motion of rain droplets in addition to the intensity of the precipitation. Both types of data can be analyzed to determine the structure of storms and their potential to cause severe weather.
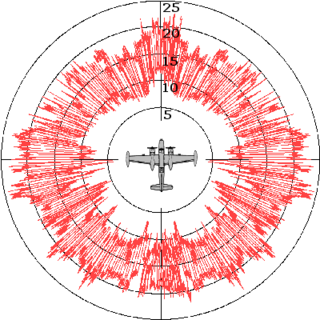
Radar cross-section (RCS) is a measure of how detectable an object is by radar. A larger RCS indicates that an object is more easily detected.

Imaging radar is an application of radar which is used to create two-dimensional images, typically of landscapes. Imaging radar provides its light to illuminate an area on the ground and take a picture at radio wavelengths. It uses an antenna and digital computer storage to record its images. In a radar image, one can see only the energy that was reflected back towards the radar antenna. The radar moves along a flight path and the area illuminated by the radar, or footprint, is moved along the surface in a swath, building the image as it does so.
In pulsed radar and sonar signal processing, an ambiguity function is a two-dimensional function of time delay and Doppler frequency showing the distortion of a returned pulse due to the receiver matched filter due to the Doppler shift of the return from a moving target. The ambiguity function is determined by the properties of the pulse and the matched filter, and not any particular target scenario. Many definitions of the ambiguity function exist; Some are restricted to narrowband signals and others are suitable to describe the propagation delay and Doppler relationship of wideband signals. Often the definition of the ambiguity function is given as the magnitude squared of other definitions (Weiss). For a given complex baseband pulse , the narrowband ambiguity function is given by

Continuous-wave radar is a type of radar system where a known stable frequency continuous wave radio energy is transmitted and then received from any reflecting objects. Continuous-wave (CW) radar uses Doppler, which renders the radar immune to interference from large stationary objects and slow moving clutter.

The Medicina Radio Observatory is an astronomical observatory located 30 km from Bologna, Italy. It is operated by the Institute for Radio Astronomy of the National Institute for Astrophysics (INAF) of the government of Italy.

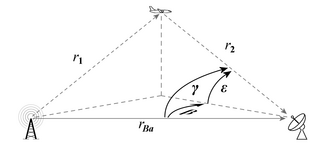
Bistatic range refers to the basic measurement of range made by a radar or sonar system with separated transmitter and receiver. The receiver measures the time difference of arrival of the signal from the transmitter directly, and via reflection from the target. This defines an ellipse of constant bistatic range, called an iso-range contour, on which the target lies, with foci centred on the transmitter and receiver. If the target is at range Rrx from the receiver and range Rtx from the transmitter, and the receiver and transmitter are a distance L apart, then the bistatic range is Rrx+Rtx-L. Motion of the target causes a rate of change of bistatic range, which results in bistatic Doppler shift.
Bistatic Doppler shift is a specific example of the Doppler effect that is observed by a radar or sonar system with a separated transmitter and receiver. The Doppler shift is due to the component of motion of the object in the direction of the transmitter, plus the component of motion of the object in the direction of the receiver. Equivalently, it can be considered as proportional to the rate of change of bistatic range.
Radar engineering details are technical details pertaining to the components of a radar and their ability to detect the return energy from moving scatterers — determining an object's position or obstruction in the environment. This includes field of view in terms of solid angle and maximum unambiguous range and velocity, as well as angular, range and velocity resolution. Radar sensors are classified by application, architecture, radar mode, platform, and propagation window.
Radar MASINT is a subdiscipline of measurement and signature intelligence (MASINT) and refers to intelligence gathering activities that bring together disparate elements that do not fit within the definitions of signals intelligence (SIGINT), imagery intelligence (IMINT), or human intelligence (HUMINT).
Most sonar systems are monostatic, in that the transmitter and receiver are in the same place. Bistatic sonar describes when the transmitter and receiver(s) are separated by a distance large enough to be comparable to the distance to the target.
Sugar Tree is the name of a bistatic radar Over-the-horizon radar built by the US in the 1960s. The key idea in Sugar Tree was a reinvention of Klein Heidelberg Nazi German radar system developed for use in the Second World War. Sugar Tree was a "covert hitchhiker using Soviet, surface-wave HF radio broadcast signals and a remote sky-wave receiver to detect Soviet ballistic missile launches". The key idea, in other words, is to receive radar reflexions without oneself transmitting a radar signal by using instead some other signal, typically one that originates from the adversary.
Laus was the name for a series of German ECCM equipment during World War II. They were additions to German radar equipment in order to counteract the Allied use of 'Window', a chaff radar countermeasure.
Klein Heidelberg (KH) was a passive radar system deployed by the Germans during World War II. It used the signals broadcast by the British Chain Home system as its transmitter, and a series of six stations along the western coast of continental Europe as passive receivers. In modern terminology, the system was a bistatic radar. Because the system sent no signals of its own, the allies were unaware of its presence, and did not learn of the system until well after the D-Day invasion. The system is referred to as Klein Heidelberg Parasit in some references.