In mathematics, particularly topology, one describes a manifold using an atlas. An atlas consists of individual charts that, roughly speaking, describe individual regions of the manifold. If the manifold is the surface of the Earth, then an atlas has its more common meaning. In general, the notion of atlas underlies the formal definition of a manifold and related structures such as vector bundles and other fibre bundles.

In the mathematical field of differential geometry, the Riemann curvature tensor or Riemann–Christoffel tensor is the most common method used to express the curvature of Riemannian manifolds. It assigns a tensor to each point of a Riemannian manifold, that measures the extent to which the metric tensor is not locally isometric to that of Euclidean space. The curvature tensor can also be defined for any pseudo-Riemannian manifold, or indeed any manifold equipped with an affine connection.
In differential geometry, a (smooth) Riemannian manifold or (smooth) Riemannian space(M, g) is a real, smooth manifold M equipped with an inner product gp on the tangent space TpM at each point p that varies smoothly from point to point in the sense that if X and Y are differentiable vector fields on M, then p ↦ gp(X|p, Y|p) is a smooth function. The family gp of inner products is called a Riemannian metric. These terms are named after the German mathematician Bernhard Riemann. The study of Riemannian manifolds constitutes the subject called Riemannian geometry.
In the mathematical fields of differential geometry and tensor calculus, differential forms are an approach to multivariable calculus that is independent of coordinates. Differential forms provide a unified approach to define integrands over curves, surfaces, volumes, and higher-dimensional manifolds. The modern notion of differential forms was pioneered by Élie Cartan. It has many applications, especially in geometry, topology and physics.
In differential geometry, the Ricci curvature tensor, named after Gregorio Ricci-Curbastro, represents the amount by which the volume of a narrow conical piece of a small geodesic ball in a curved Riemannian manifold deviates from that of the standard ball in Euclidean space. As such, it provides one way of measuring the degree to which the geometry determined by a given Riemannian metric might differ from that of ordinary Euclidean n-space. The Ricci tensor is defined on any pseudo-Riemannian manifold, as a trace of the Riemann curvature tensor. Like the metric itself, the Ricci tensor is a symmetric bilinear form on the tangent space of the manifold.
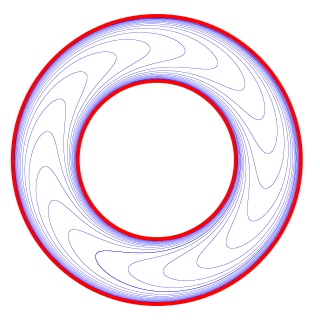
In mathematics, a foliation is an equivalence relation on an n-manifold, the equivalence classes being connected, injectively immersed submanifolds, all of the same dimension p, modeled on the decomposition of the real coordinate space Rn into the cosets x + Rp of the standardly embedded subspace Rp. The equivalence classes are called the leaves of the foliation. If the manifold and/or the submanifolds are required to have a piecewise-linear, differentiable, or analytic structure then one defines piecewise-linear, differentiable, or analytic foliations, respectively. In the most important case of differentiable foliation of class Cr it is usually understood that r ≥ 1. The number p is called the dimension of the foliation and q = n - p is called its codimension.
In fluid mechanics or more generally continuum mechanics, incompressible flow refers to a flow in which the material density is constant within a fluid parcel—an infinitesimal volume that moves with the flow velocity. An equivalent statement that implies incompressibility is that the divergence of the flow velocity is zero.
In mathematics, particularly in differential topology, there are two Whitney embedding theorems, named after Hassler Whitney:
In mathematics, geometric topology is the study of manifolds and maps between them, particularly embeddings of one manifold into another.
In geometric topology and differential topology, an (n + 1)-dimensional cobordism W between n-dimensional manifolds M and N is an h-cobordism if the inclusion maps
In the mathematical field of geometric topology, a Heegaard splitting is a decomposition of a compact oriented 3-manifold that results from dividing it into two handlebodies.
In mathematics, an incompressible surface is a surface properly embedded in a 3-manifold, which, in intuitive terms, is a "nontrivial" surface that has been simplified as much as possible by compressing disks. They are useful for decomposition of Haken manifolds and for normal surface theory.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a linear space to allow one to do calculus. Any manifold can be described by a collection of charts, also known as an atlas. One may then apply ideas from calculus while working within the individual charts, since each chart lies within a linear space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.
In general relativity, the Gibbons–Hawking–York boundary term is a term that needs to be added to the Einstein–Hilbert action when the underlying spacetime manifold has a boundary.

In mathematics, the differential geometry of surfaces deals with the differential geometry of smooth surfaces with various additional structures, most often, a Riemannian metric. Surfaces have been extensively studied from various perspectives: extrinsically, relating to their embedding in Euclidean space and intrinsically, reflecting their properties determined solely by the distance within the surface as measured along curves on the surface. One of the fundamental concepts investigated is the Gaussian curvature, first studied in depth by Carl Friedrich Gauss, who showed that curvature was an intrinsic property of a surface, independent of its isometric embedding in Euclidean space.
The Prandtl–Glauert transformation is a mathematical technique which allows solving certain compressible flow problems by incompressible-flow calculation methods. It also allows applying incompressible-flow data to compressible-flow cases.

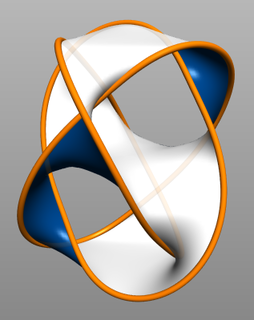
Fluid films, such as soap films, are commonly encountered in everyday experience. A soap film can be formed by dipping a closed contour wire into a soapy solution as in the figure on the right. Alternatively, a catenoid can be formed by dipping two rings in the soapy solution and subsequently separating them while maintaining the coaxial configuration.

The calculus of moving surfaces (CMS) is an extension of the classical tensor calculus to deforming manifolds. Central to the CMS is the Tensorial Time Derivative whose original definition was put forth by Jacques Hadamard. It plays the role analogous to that of the covariant derivative on differential manifolds. in that it produces a tensor when applied to a tensor.
In differential geometry, the integration along fibers of a k-form yields a -form where m is the dimension of the fiber, via "integration".












