Look up connection in Wiktionary, the free dictionary.
Wikiquote has quotations related to connection .
Connection may refer to:
Connection may refer to:

Differential geometry is a mathematical discipline that studies the geometry of smooth shapes and smooth spaces, otherwise known as smooth manifolds. It uses the techniques of differential calculus, integral calculus, linear algebra and multilinear algebra. The field has its origins in the study of spherical geometry as far back as antiquity. It also relates to astronomy, the geodesy of the Earth, and later the study of hyperbolic geometry by Lobachevsky. The simplest examples of smooth spaces are the plane and space curves and surfaces in the three-dimensional Euclidean space, and the study of these shapes formed the basis for development of modern differential geometry during the 18th and 19th centuries.

In geometry, a geodesic is a curve representing in some sense the shortest path (arc) between two points in a surface, or more generally in a Riemannian manifold. The term also has meaning in any differentiable manifold with a connection. It is a generalization of the notion of a "straight line".
In mathematics and physics, a tensor field is a function assigning a tensor to each point of a region of a mathematical space or of the physical space. Tensor fields are used in differential geometry, algebraic geometry, general relativity, in the analysis of stress and strain in material object, and in numerous applications in the physical sciences. As a tensor is a generalization of a scalar and a vector, a tensor field is a generalization of a scalar field and a vector field that assigns, respectively, a scalar or vector to each point of space. If a tensor A is defined on a vector fields set X(M) over a module M, we call A a tensor field on M. Many mathematical structures called "tensors" are also tensor fields. For example, the Riemann curvature tensor is a tensor field as it associates a tensor to each point of a Riemannian manifold, which is a topological space.
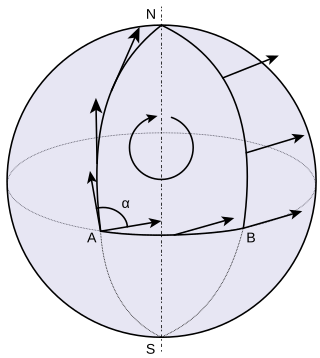
In differential geometry, parallel transport is a way of transporting geometrical data along smooth curves in a manifold. If the manifold is equipped with an affine connection, then this connection allows one to transport vectors of the manifold along curves so that they stay parallel with respect to the connection.
In geometry, the notion of a connection makes precise the idea of transporting local geometric objects, such as tangent vectors or tensors in the tangent space, along a curve or family of curves in a parallel and consistent manner. There are various kinds of connections in modern geometry, depending on what sort of data one wants to transport. For instance, an affine connection, the most elementary type of connection, gives a means for parallel transport of tangent vectors on a manifold from one point to another along a curve. An affine connection is typically given in the form of a covariant derivative, which gives a means for taking directional derivatives of vector fields, measuring the deviation of a vector field from being parallel in a given direction.
In the mathematical field of differential geometry, a Cartan connection is a flexible generalization of the notion of an affine connection. It may also be regarded as a specialization of the general concept of a principal connection, in which the geometry of the principal bundle is tied to the geometry of the base manifold using a solder form. Cartan connections describe the geometry of manifolds modelled on homogeneous spaces.
In mathematics, the covariant derivative is a way of specifying a derivative along tangent vectors of a manifold. Alternatively, the covariant derivative is a way of introducing and working with a connection on a manifold by means of a differential operator, to be contrasted with the approach given by a principal connection on the frame bundle – see affine connection. In the special case of a manifold isometrically embedded into a higher-dimensional Euclidean space, the covariant derivative can be viewed as the orthogonal projection of the Euclidean directional derivative onto the manifold's tangent space. In this case the Euclidean derivative is broken into two parts, the extrinsic normal component and the intrinsic covariant derivative component.

In mathematics, a moving frame is a flexible generalization of the notion of an ordered basis of a vector space often used to study the extrinsic differential geometry of smooth manifolds embedded in a homogeneous space.
This is a glossary of terms specific to differential geometry and differential topology. The following three glossaries are closely related:

In differential geometry, an affine connection is a geometric object on a smooth manifold which connects nearby tangent spaces, so it permits tangent vector fields to be differentiated as if they were functions on the manifold with values in a fixed vector space. Connections are among the simplest methods of defining differentiation of the sections of vector bundles.

In differential geometry, the holonomy of a connection on a smooth manifold is the extent to which parallel transport around closed loops fails to preserve the geometrical data being transported. Holonomy is a general geometrical consequence of the curvature of the connection. For flat connections, the associated holonomy is a type of monodromy and is an inherently global notion. For curved connections, holonomy has nontrivial local and global features.
In mathematics, and specifically differential geometry, a connection form is a manner of organizing the data of a connection using the language of moving frames and differential forms.
In differential geometry, a G-structure on an n-manifold M, for a given structure group G, is a principal G-subbundle of the tangent frame bundle FM (or GL(M)) of M.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a vector space to allow one to apply calculus. Any manifold can be described by a collection of charts (atlas). One may then apply ideas from calculus while working within the individual charts, since each chart lies within a vector space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.
In mathematics, the tensor bundle of a manifold is the direct sum of all tensor products of the tangent bundle and the cotangent bundle of that manifold. To do calculus on the tensor bundle a connection is needed, except for the special case of the exterior derivative of antisymmetric tensors.

In differential geometry, the torsion tensor is a tensor that is associated to any affine connection. The torsion tensor is a bilinear map of two input vectors , that produces an output vector representing the displacement within a tangent space when the tangent space is developed along an infinitesimal parallelogram whose sides are . It is skew symmetric in its inputs, because developing over the parallelogram in the opposite sense produces the opposite displacement, similarly to how a screw moves in opposite ways when it is twisted in two directions.
In differential geometry, an Ehresmann connection is a version of the notion of a connection, which makes sense on any smooth fiber bundle. In particular, it does not rely on the possible vector bundle structure of the underlying fiber bundle, but nevertheless, linear connections may be viewed as a special case. Another important special case of Ehresmann connections are principal connections on principal bundles, which are required to be equivariant in the principal Lie group action.
In the mathematical field of differential geometry, the term linear connection can refer to either of the following overlapping concepts:

In mathematics, more precisely in differential geometry, a soldering of a fiber bundle to a smooth manifold is a manner of attaching the fibers to the manifold in such a way that they can be regarded as tangent. Intuitively, soldering expresses in abstract terms the idea that a manifold may have a point of contact with a certain model Klein geometry at each point. In extrinsic differential geometry, the soldering is simply expressed by the tangency of the model space to the manifold. In intrinsic geometry, other techniques are needed to express it. Soldering was introduced in this general form by Charles Ehresmann in 1950.