In mathematics, a symplectic manifold is a smooth manifold, M, equipped with a closed nondegenerate differential 2-form, ω, called the symplectic form. The study of symplectic manifolds is called symplectic geometry or symplectic topology. Symplectic manifolds arise naturally in abstract formulations of classical mechanics and analytical mechanics as the cotangent bundles of manifolds. For example, in the Hamiltonian formulation of classical mechanics, which provides one of the major motivations for the field, the set of all possible configurations of a system is modeled as a manifold, and this manifold's cotangent bundle describes the phase space of the system.
In the mathematical fields of differential geometry and tensor calculus, differential forms are an approach to multivariable calculus that is independent of coordinates. Differential forms provide a unified approach to define integrands over curves, surfaces, volumes, and higher-dimensional manifolds. The modern notion of differential forms was pioneered by Élie Cartan. It has many applications, especially in geometry, topology and physics.
In mathematics, especially differential geometry, the cotangent bundle of a smooth manifold is the vector bundle of all the cotangent spaces at every point in the manifold. It may be described also as the dual bundle to the tangent bundle.
In the mathematical field of differential geometry, a Cartan connection is a flexible generalization of the notion of an affine connection. It may also be regarded as a specialization of the general concept of a principal connection, in which the geometry of the principal bundle is tied to the geometry of the base manifold using a solder form. Cartan connections describe the geometry of manifolds modelled on homogeneous spaces.

In physics, a covariant transformation is a rule that specifies how certain entities, such as vectors or tensors, change under a change of basis. The transformation that describes the new basis vectors as a linear combination of the old basis vectors is defined as a covariant transformation. Conventionally, indices identifying the basis vectors are placed as lower indices and so are all entities that transform in the same way. The inverse of a covariant transformation is a contravariant transformation. Whenever a vector should be invariant under a change of basis, that is to say it should represent the same geometrical or physical object having the same magnitude and direction as before, its components must transform according to the contravariant rule. Conventionally, indices identifying the components of a vector are placed as upper indices and so are all indices of entities that transform in the same way. The sum over pairwise matching indices of a product with the same lower and upper indices are invariant under a transformation.

In mathematics, contact geometry is the study of a geometric structure on smooth manifolds given by a hyperplane distribution in the tangent bundle satisfying a condition called 'complete non-integrability'. Equivalently, such a distribution may be given as the kernel of a differential one-form, and the non-integrability condition translates into a maximal non-degeneracy condition on the form. These conditions are opposite to two equivalent conditions for 'complete integrability' of a hyperplane distribution, i.e. that it be tangent to a codimension one foliation on the manifold, whose equivalence is the content of the Frobenius theorem.
In mathematics, an almost complex manifold is a smooth manifold equipped with a smooth linear complex structure on each tangent space. The existence of this structure is a necessary, but not sufficient, condition for a manifold to be a complex manifold. That is, every complex manifold is an almost complex manifold, but not vice versa. Almost complex structures have important applications in symplectic geometry.
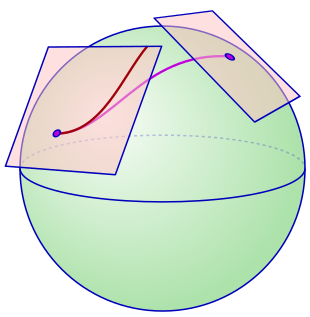
In the branch of mathematics called differential geometry, an affine connection is a geometric object on a smooth manifold which connects nearby tangent spaces, so it permits tangent vector fields to be differentiated as if they were functions on the manifold with values in a fixed vector space. The notion of an affine connection has its roots in 19th-century geometry and tensor calculus, but was not fully developed until the early 1920s, by Élie Cartan and Hermann Weyl. The terminology is due to Cartan and has its origins in the identification of tangent spaces in Euclidean space Rn by translation: the idea is that a choice of affine connection makes a manifold look infinitesimally like Euclidean space not just smoothly, but as an affine space.

In mathematics, specifically differential geometry, the infinitesimal geometry of Riemannian manifolds with dimension greater than 2 is too complicated to be described by a single number at a given point. Riemann introduced an abstract and rigorous way to define curvature for these manifolds, now known as the Riemann curvature tensor. Similar notions have found applications everywhere in differential geometry.
In mathematics and classical mechanics, canonical coordinates are sets of coordinates on phase space which can be used to describe a physical system at any given point in time. Canonical coordinates are used in the Hamiltonian formulation of classical mechanics. A closely related concept also appears in quantum mechanics; see the Stone–von Neumann theorem and canonical commutation relations for details.
In abstract algebra and multilinear algebra, a multilinear form on is a map of the type
,
In mathematics, the Maurer–Cartan form for a Lie group G is a distinguished differential one-form on G that carries the basic infinitesimal information about the structure of G. It was much used by Élie Cartan as a basic ingredient of his method of moving frames, and bears his name together with that of Ludwig Maurer.
The vierbein or tetrad theory much used in theoretical physics is a special case of the application of Cartan connection in four-dimensional manifolds. It applies to metrics of any signature. This section is an approach to tetrads, but written in general terms. In dimensions other than 4, words like triad, pentad, zweibein, fünfbein, elfbein etc. have been used. Vielbein covers all dimensions.
In mathematics and physics, the Christoffel symbols are an array of numbers describing a metric connection. The metric connection is a specialization of the affine connection to surfaces or other manifolds endowed with a metric, allowing distances to be measured on that surface. In differential geometry, an affine connection can be defined without any reference to a metric, and many additional concepts follow: parallel transport, covariant derivatives, geodesics, etc. also do not require the concept of a metric. However, when a metric is available, these concepts can be directly tied to the "shape" of the manifold itself; that shape is determined by how the tangent space is attached to the cotangent space by the metric tensor. Abstractly, one would say that the manifold has an associated (orthonormal) frame bundle, with each "frame" being a possible choice of a coordinate frame. An invariant metric implies that the structure group of the frame bundle is the orthogonal group SO(m,n). As a result, such a manifold is necessarily a (pseudo-)Riemannian manifold. The Christoffel symbols provide a concrete representation of the connection of (pseudo-)Riemannian geometry in terms of coordinates on the manifold. Additional concepts, such as parallel transport, geodesics, etc. can then be expressed in terms of Christoffel symbols.
In mathematics, the tautological one-form is a special 1-form defined on the cotangent bundle of a manifold . In physics, it is used to create a correspondence between the velocity of a point in a mechanical system to its momentum, thus providing a bridge between Lagrangian mechanics with Hamiltonian mechanics.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a linear space to allow one to do calculus. Any manifold can be described by a collection of charts, also known as an atlas. One may then apply ideas from calculus while working within the individual charts, since each chart lies within a linear space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.
In differential geometry, a field of mathematics, a normal bundle is a particular kind of vector bundle, complementary to the tangent bundle, and coming from an embedding.
In mathematics, a metric connection is a connection in a vector bundle E equipped with a bundle metric; that is, a metric for which the inner product of any two vectors will remain the same when those vectors are parallel transported along any curve. Other common equivalent formulations of a metric connection include:
In mathematics, a holomorphic vector bundle is a complex vector bundle over a complex manifold X such that the total space E is a complex manifold and the projection map π : E → X is holomorphic. Fundamental examples are the holomorphic tangent bundle of a complex manifold, and its dual, the holomorphic cotangent bundle. A holomorphic line bundle is a rank one holomorphic vector bundle.
In algebraic geometry, given a morphism f: X → S of schemes, the cotangent sheaf on X is the sheaf of -modules that represents S-derivations in the sense: for any -modules F, there is an isomorphism





