Astrobiology is a scientific field within the life and environmental sciences that studies the origins, early evolution, distribution, and future of life in the universe by investigating its deterministic conditions and contingent events. As a discipline, astrobiology is founded on the premise that life may exist beyond Earth.

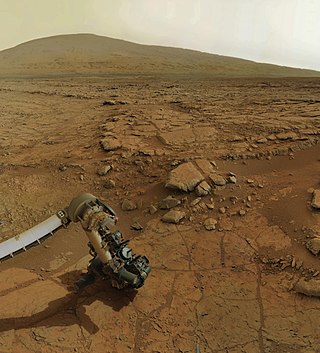
2001 Mars Odyssey is a robotic spacecraft orbiting the planet Mars. The project was developed by NASA, and contracted out to Lockheed Martin, with an expected cost for the entire mission of US$297 million. Its mission is to use spectrometers and a thermal imager to detect evidence of past or present water and ice, as well as study the planet's geology and radiation environment. The data Odyssey obtains is intended to help answer the question of whether life once existed on Mars and create a risk-assessment of the radiation that future astronauts on Mars might experience. It also acts as a relay for communications between the Curiosity rover, and previously the Mars Exploration Rovers and Phoenix lander, to Earth. The mission was named as a tribute to Arthur C. Clarke, evoking the name of his and Stanley Kubrick's 1968 film 2001: A Space Odyssey.

Uncrewed spacecraft or robotic spacecraft are spacecraft without people on board. Uncrewed spacecraft may have varying levels of autonomy from human input, such as remote control, or remote guidance. They may also be autonomous, in which they have a pre-programmed list of operations that will be executed unless otherwise instructed. A robotic spacecraft for scientific measurements is often called a space probe or space observatory.

The Mars Polar Lander, also known as the Mars Surveyor '98 Lander, was a 290-kilogram uncrewed spacecraft lander launched by NASA on January 3, 1999, to study the soil and climate of Planum Australe, a region near the south pole on Mars. It formed part of the Mars Surveyor '98 mission. On December 3, 1999, however, after the descent phase was expected to be complete, the lander failed to reestablish communication with Earth. A post-mortem analysis determined the most likely cause of the mishap was premature termination of the engine firing prior to the lander touching the surface, causing it to strike the planet at a high velocity.

Opportunity, also known as MER-B or MER-1, and nicknamed Oppy, is a robotic rover that was active on Mars from 2004 until 2018. Opportunity was operational on Mars for 5111 sols. Launched on July 7, 2003, as part of NASA's Mars Exploration Rover program, it landed in Meridiani Planum on January 25, 2004, three weeks after its twin, Spirit (MER-A), touched down on the other side of the planet. With a planned 90-sol duration of activity, Spirit functioned until it got stuck in 2009 and ceased communications in 2010, while Opportunity was able to stay operational for 5111 sols after landing, maintaining its power and key systems through continual recharging of its batteries using solar power, and hibernating during events such as dust storms to save power. This careful operation allowed Opportunity to operate for 57 times its designed lifespan, exceeding the initial plan by 14 years, 47 days. By June 10, 2018, when it last contacted NASA, the rover had traveled a distance of 45.16 kilometers.
The planet Mars has been explored remotely by spacecraft. Probes sent from Earth, beginning in the late 20th century, have yielded a large increase in knowledge about the Martian system, focused primarily on understanding its geology and habitability potential. Engineering interplanetary journeys is complicated and the exploration of Mars has experienced a high failure rate, especially the early attempts. Roughly sixty percent of all spacecraft destined for Mars failed before completing their missions, with some failing before their observations could begin. Some missions have been met with unexpected success, such as the twin Mars Exploration Rovers, Spirit and Opportunity, which operated for years beyond their specification.

Phoenix was an uncrewed space probe that landed on the surface of Mars on May 25, 2008, and operated until November 2, 2008. Phoenix was operational on Mars for 157 sols. Its instruments were used to assess the local habitability and to research the history of water on Mars. The mission was part of the Mars Scout Program; its total cost was $420 million, including the cost of launch.
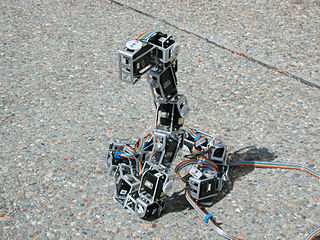
A snakebot, also referred to as a snake robot, is a biomorphic robot that resembles a snake. Snakebots have uses similar to those of certain types of soft robots.

Lego Space is a science fiction-oriented Lego theme which focuses on astronauts, space colonization, spaceships, and extraterrestrial life. Introduced in 1978, along with Castle and Town, with each of the three themes representing the 'Past' (Castle), 'Present' (Town) and 'Future' (Space). It is one of the oldest and most extensive themes in Lego history, consisting of over 300 individual sets.

The Astrobiology Field Laboratory (AFL) was a proposed NASA rover that would have conducted a search for life on Mars. This proposed mission, which was not funded, would have landed a rover on Mars in 2016 and explore a site for habitat. Examples of such sites are an active or extinct hydrothermal deposit, a dry lake or a specific polar site.

A cryobot or Philberth-probe is a robot that can penetrate water ice. A cryobot uses heat to melt the ice, and gravity to sink downward.

Titan Mare Explorer (TiME) is a proposed design for a lander for Saturn's moon Titan. TiME is a relatively low-cost, outer-planet mission designed to measure the organic constituents on Titan and would have performed the first nautical exploration of an extraterrestrial sea, analyze its nature and, possibly, observe its shoreline. As a Discovery-class mission it was designed to be cost-capped at US$425 million, not counting launch vehicle funding. It was proposed to NASA in 2009 by Proxemy Research as a scout-like pioneering mission, originally as part of NASA's Discovery Program. The TiME mission design reached the finalist stage during that Discovery mission selection, but was not selected, and despite attempts in the U.S. Senate failed to get earmark funding in 2013. A related Titan Submarine has also been proposed.

NEO Surveyor, formerly called Near-Earth Object Camera (NEOCam), then NEO Surveillance Mission, is a planned space-based infrared telescope designed to survey the Solar System for potentially hazardous asteroids.

The Mars Geyser Hopper (MGH) was proposed in 2012 as a NASA design reference mission for a Discovery-class spacecraft concept that would investigate the springtime carbon dioxide Martian geysers found in regions around the south pole of Mars.
Phobos Surveyor is a mission concept under preliminary study by Marco Pavone of Stanford University, the NASA Jet Propulsion Laboratory (JPL), and the Massachusetts Institute of Technology as a part of NASA's Innovative Advanced Concepts program.

Europa Clipper is a space probe developed by NASA to study Europa, a Galilean moon of Jupiter. It was launched on October 14, 2024. The spacecraft will use gravity assists from Mars on March 1, 2025, and Earth on December 3, 2026, before arriving at Europa in April 2030. The spacecraft will then perform a series of flybys of Europa while in orbit around Jupiter.
The World Is Not Enough (WINE) is a US project developing a refuelable steam engine system for spacecraft propulsion. WINE developed a method of extracting volatiles from ice, ice-rich regolith, and hydrated soils and uses it as steam propulsion which allows the spacecraft to refuel multiple times and have an extraordinary long service lifetime. This would allow a single spacecraft to visit multiple asteroids, comets or several landing locations at an icy world such as the Moon, Mars, Pluto, Enceladus, Ganymede, Europa, etc.

BRUIE is an autonomous underwater vehicle prototype by NASA's Jet Propulsion Laboratory. The prototype began underwater testing in 2012 and it is meant to eventually explore the interior of water worlds in the Solar System, such as Europa or Enceladus.

The Power and Propulsion Element (PPE), previously known as the Asteroid Redirect Vehicle propulsion system, is a planned solar electric ion propulsion module being developed by Maxar Technologies for NASA. It is one of the major components of the Lunar Gateway. The PPE will allow access to the entire lunar surface and a wide range of lunar orbits and double as a space tug for visiting craft.
