A fixed point of an isometry group is a point that is a fixed point for every isometry in the group. For any isometry group in Euclidean space the set of fixed points is either empty or an affine space.

In mathematics, a fixed point of a function is an element of the function's domain that is mapped to itself by the function. That is to say, c is a fixed point of the function f(x) if f(c) = c. This means f(f ) = fn(c) = c, an important terminating consideration when recursively computing f. A set of fixed points is sometimes called a fixed set.
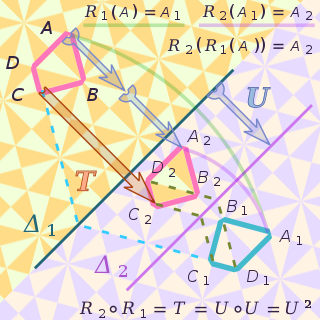
In mathematics, an isometry is a distance-preserving transformation between metric spaces, usually assumed to be bijective.
In mathematics, the isometry group of a metric space is the set of all bijective isometries from the metric space onto itself, with the function composition as group operation. Its identity element is the identity function.
Contents
For an object, any unique centre and, more generally, any point with unique properties with respect to the object is a fixed point of its symmetry group.

In geometry, a centre of an object is a point in some sense in the middle of the object. According to the specific definition of centre taken into consideration, an object might have no centre. If geometry is regarded as the study of isometry groups then a centre is a fixed point of all the isometries which move the object onto itself.

In group theory, the symmetry group of a geometric object is the group of all transformations under which the object is invariant, endowed with the group operation of composition. Such a transformation is an invertible mapping of the ambient space which takes the object to itself, and which preserves all the relevant structure of the object. A frequent notation for the symmetry group of an object X is G = Sym(X).
In particular this applies for the centroid of a figure, if it exists. In the case of a physical body, if for the symmetry not only the shape but also the density is taken into account, it applies to the centre of mass.

In mathematics and physics, the centroid or geometric center of a plane figure is the arithmetic mean position of all the points in the figure. Informally, it is the point at which a cutout of the shape could be perfectly balanced on the tip of a pin.

In physics, the center of mass of a distribution of mass in space is the unique point where the weighted relative position of the distributed mass sums to zero. This is the point to which a force may be applied to cause a linear acceleration without an angular acceleration. Calculations in mechanics are often simplified when formulated with respect to the center of mass. It is a hypothetical point where entire mass of an object may be assumed to be concentrated to visualise its motion. In other words, the center of mass is the particle equivalent of a given object for application of Newton's laws of motion.
If the set of fixed points of the symmetry group of an object is a singleton then the object has a specific centre of symmetry. The centroid and centre of mass, if defined, are this point. Another meaning of "centre of symmetry" is a point with respect to which inversion symmetry applies. Such a point needs not be unique; if it is not, there is translational symmetry, hence there are infinitely many of such points. On the other hand, in the cases of e.g. C3h and D2 symmetry there is a centre of symmetry in the first sense, but no inversion.
In mathematics, a singleton, also known as a unit set, is a set with exactly one element. For example, the set {null} is a singleton.

In geometry, a translation "slides" a thing by a: Ta(p) = p + a.
If the symmetry group of an object has no fixed points then the object is infinite and its centroid and centre of mass are undefined.
If the set of fixed points of the symmetry group of an object is a line or plane then the centroid and centre of mass of the object, if defined, and any other point that has unique properties with respect to the object, are on this line or plane.