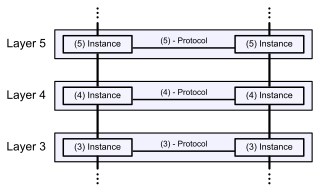
The Open Systems Interconnection model is a conceptual model from the International Organization for Standardization (ISO) that "provides a common basis for the coordination of standards development for the purpose of systems interconnection." In the OSI reference model, the communications between systems are split into seven different abstraction layers: Physical, Data Link, Network, Transport, Session, Presentation, and Application.

Network topology is the arrangement of the elements of a communication network. Network topology can be used to define or describe the arrangement of various types of telecommunication networks, including command and control radio networks, industrial fieldbusses and computer networks.
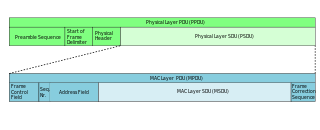
In telecommunications, a protocol data unit (PDU) is a single unit of information transmitted among peer entities of a computer network. It is composed of protocol-specific control information and user data. In the layered architectures of communication protocol stacks, each layer implements protocols tailored to the specific type or mode of data exchange.
The data link layer, or layer 2, is the second layer of the seven-layer OSI model of computer networking. This layer is the protocol layer that transfers data between nodes on a network segment across the physical layer. The data link layer provides the functional and procedural means to transfer data between network entities and may also provide the means to detect and possibly correct errors that can occur in the physical layer.
A controller area network is a vehicle bus standard designed to allow microcontrollers and devices to communicate with each other's applications without a host computer. It is a message-based protocol, designed originally for multiplex electrical wiring within automobiles to save on copper, but it can also be used in many other contexts. For each device, the data in a frame is transmitted serially but in such a way that if more than one device transmits at the same time, the highest priority device can continue while the others back off. Frames are received by all devices, including by the transmitting device.
A vehicle bus is a specialized internal communications network that interconnects components inside a vehicle. In electronics, a bus is simply a device that connects multiple electrical or electronic devices together. Special requirements for vehicle control such as assurance of message delivery, of non-conflicting messages, of minimum time of delivery, of low cost, and of EMF noise resilience, as well as redundant routing and other characteristics mandate the use of less common networking protocols. Protocols include Controller Area Network (CAN), Local Interconnect Network (LIN) and others. Conventional computer networking technologies are rarely used, except in aircraft, where implementations of the ARINC 664 such as the Avionics Full-Duplex Switched Ethernet are used. Aircraft that use AFDX include the B787, the A400M and the A380. Trains commonly use Ethernet Consist Network (ECN). All cars sold in the United States since 1996 are required to have an On-Board Diagnostics connector, for access to the car's electronic controllers.

On-board diagnostics (OBD) is a term referring to a vehicle's self-diagnostic and reporting capability. In the United States, this self-diagnostic is a requirement to comply with Federal Emissions standards to detect failures that may increase the vehicle tailpipe emissions to more than 150% of the standard to which it was originally certified.
A fieldbus is a member of a family of industrial digital communication networks used for real-time distributed control. Fieldbus profiles are standardized by the International Electrotechnical Commission (IEC) as IEC 61784/61158.
The next-generation network (NGN) is a body of key architectural changes in telecommunication core and access networks. The general idea behind the NGN is that one network transports all information and services by encapsulating these into IP packets, similar to those used on the Internet. NGNs are commonly built around the Internet Protocol, and therefore the term all IP is also sometimes used to describe the transformation of formerly telephone-centric networks toward NGN.

Profinet is an industry technical standard for data communication over Industrial Ethernet, designed for collecting data from, and controlling equipment in industrial systems, with a particular strength in delivering data under tight time constraints. The standard is maintained and supported by Profibus and Profinet International, an umbrella organization headquartered in Karlsruhe, Germany.
EtherCAT is an Ethernet-based fieldbus system developed by Beckhoff Automation. The protocol is standardized in IEC 61158 and is suitable for both hard and soft real-time computing requirements in automation technology.
DeviceNet is a network protocol used in the automation industry to interconnect control devices for data exchange. It utilizes the Common Industrial Protocol over a Controller Area Network media layer and defines an application layer to cover a range of device profiles. Typical applications include information exchange, safety devices, and large I/O control networks.
In mobile-telephone technology, the UniPro protocol stack follows the architecture of the classical OSI Reference Model. In UniPro, the OSI Physical Layer is split into two sublayers: Layer 1 and Layer 1.5 which abstracts from differences between alternative Layer 1 technologies. The actual physical layer is a separate specification as the various PHY options are reused in other MIPI Alliance specifications.
Keyword Protocol 2000, abbreviated KWP2000, is a communications protocol used for on-board vehicle diagnostics systems (OBD). This protocol covers the application layer in the OSI model of computer networking. The protocol is standardized by International Organization for Standardization as ISO 14230. KWP2000 also covers the session layer in the OSI model, in terms of starting, maintaining and terminating a communications session.
A communication protocol is a system of rules that allows two or more entities of a communications system to transmit information via any variation of a physical quantity. The protocol defines the rules, syntax, semantics, and synchronization of communication and possible error recovery methods. Protocols may be implemented by hardware, software, or a combination of both.
ISO 15765-2, or ISO-TP (Transport Layer), is an international standard for sending data packets over a CAN-Bus. The protocol allows for the transport of messages that exceed the eight byte maximum payload of CAN frames. ISO-TP segments longer messages into multiple frames, adding metadata (CAN-TP Header) that allows the interpretation of individual frames and reassembly into a complete message packet by the recipient. It can carry up to 232-1 (4294967295) bytes of payload per message packet starting from the 2016 version. Prior version were limited to a maximum payload size of 4095 bytes.
MOST is a high-speed multimedia network technology for the automotive industry. It can be used for applications inside or outside the car. The serial MOST bus uses a daisy-chain topology or ring topology and synchronous serial communication to transport audio, video, voice and data signals via plastic optical fiber (POF) or electrical conductor physical layers.
Unified Diagnostic Services (UDS) is a diagnostic communication protocol used in electronic control units (ECUs) within automotive electronics, which is specified in the ISO 14229-1. It is derived from ISO 14230-3 (KWP2000) and the now obsolete ISO 15765-3. 'Unified' in this context means that it is an international and not a company-specific standard. By now this communication protocol is used in all new ECUs made by Tier 1 suppliers of Original Equipment Manufacturer (OEM), and is incorporated into other standards, such as AUTOSAR. The ECUs in modern vehicles control nearly all functions, including electronic fuel injection (EFI), engine control, the transmission, anti-lock braking system, door locks, braking, window operation, and more.