
In computing and electronic systems, binary-coded decimal (BCD) is a class of binary encodings of decimal numbers where each digit is represented by a fixed number of bits, usually four or eight. Sometimes, special bit patterns are used for a sign or other indications.
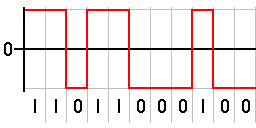
Differential Manchester encoding (DM) is a line code in digital frequency modulation in which data and clock signals are combined to form a single two-level self-synchronizing data stream. Each data bit is encoded by a presence or absence of signal level transition in the middle of the bit period, followed by the mandatory level transition at the beginning. The code is insensitive to an inversion of polarity. In various specific applications, this method is also called by various other names, including biphase mark code (CC), F2F, Aiken biphase, and conditioned diphase.
In telecommunication, a line code is a pattern of voltage, current, or photons used to represent digital data transmitted down a communication channel or written to a storage medium. This repertoire of signals is usually called a constrained code in data storage systems. Some signals are more prone to error than others as the physics of the communication channel or storage medium constrains the repertoire of signals that can be used reliably.
In telecommunication and data storage, Manchester code is a line code in which the encoding of each data bit is either low then high, or high then low, for equal time. It is a self-clocking signal with no DC component. Consequently, electrical connections using a Manchester code are easily galvanically isolated.
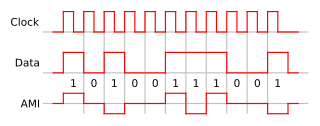
Modified AMI codes are a digital telecommunications technique to maintain system synchronization. Alternate mark inversion (AMI) line codes are modified by deliberate insertion of bipolar violations. There are several types of modified AMI codes, used in various T-carrier and E-carrier systems.
In telecommunication, a non-return-to-zero (NRZ) line code is a binary code in which ones are represented by one significant condition, usually a positive voltage, while zeros are represented by some other significant condition, usually a negative voltage, with no other neutral or rest condition.
The reflected binary code (RBC), also known as reflected binary (RB) or Gray code after Frank Gray, is an ordering of the binary numeral system such that two successive values differ in only one bit.
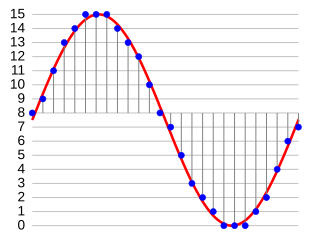
G.711 is a narrowband audio codec originally designed for use in telephony that provides toll-quality audio at 64 kbit/s. It is an ITU-T standard (Recommendation) for audio encoding, titled Pulse code modulation (PCM) of voice frequencies released for use in 1972.
Two's complement is the most common method of representing signed integers on computers, and more generally, fixed point binary values. Two's complement uses the binary digit with the greatest value as the sign to indicate whether the binary number is positive or negative; when the most significant bit is 1 the number is signed as negative and when the most significant bit is 0 the number is signed as positive. As a result, non-negative numbers are represented as themselves: 6 is 0110, zero is 0000, and -6 is 1010. Note that while the number of binary bits is fixed throughout a computation it is otherwise arbitrary.
Run-length limited or RLL coding is a line coding technique that is used to send arbitrary data over a communications channel with bandwidth limits. RLL codes are defined by four main parameters: m, n, d, k. The first two, m/n, refer to the rate of the code, while the remaining two specify the minimal d and maximal k number of zeroes between consecutive ones. This is used in both telecommunication and storage systems that move a medium past a fixed recording head.
Excess-3, 3-excess or 10-excess-3 binary code, shifted binary or Stibitz code is a self-complementary binary-coded decimal (BCD) code and numeral system. It is a biased representation. Excess-3 code was used on some older computers as well as in cash registers and hand-held portable electronic calculators of the 1970s, among other uses.
In telecommunications, 8b/10b is a line code that maps 8-bit words to 10-bit symbols to achieve DC balance and bounded disparity, and at the same time provide enough state changes to allow reasonable clock recovery. This means that the difference between the counts of ones and zeros in a string of at least 20 bits is no more than two, and that there are not more than five ones or zeros in a row. This helps to reduce the demand for the lower bandwidth limit of the channel necessary to transfer the signal.

Transition-minimized differential signaling (TMDS) is a technology for transmitting high-speed serial data used by the DVI and HDMI video interfaces, as well as by other digital communication interfaces.
In telecommunication, bipolar encoding is a type of return-to-zero (RZ) line code, where two nonzero values are used, so that the three values are +, −, and zero. Such a signal is called a duobinary signal. Standard bipolar encodings are designed to be DC-balanced, spending equal amounts of time in the + and − states.
4B3T, which stands for 4 (four) binary 3 (three) ternary, is a line encoding scheme used for ISDN PRI interface. 4B3T represents four binary bits using three pulses.

IEEE Standard 1355-1995, IEC 14575, or ISO 14575 is a data communications standard for Heterogeneous Interconnect (HIC).
The Power Management Bus (PMBus) is a variant of the System Management Bus (SMBus) which is targeted at digital management of power supplies. Like SMBus, it is a relatively slow speed two wire communications protocol based on I²C. Unlike either of those standards, it defines a substantial number of domain-specific commands rather than just saying how to communicate using commands defined by the user.
The ones' complement of a binary number is the value obtained by inverting (flipping) all the bits in the binary representation of the number. The name "ones' complement" refers to the fact that such an inverted value, if added to the original, would always produce an "all ones" number. This mathematical operation is primarily of interest in computer science, where it has varying effects depending on how a specific computer represents numbers.
Bus encoding refers to converting/encoding a piece of data to another form before launching on the bus. While bus encoding can be used to serve various purposes like reducing the number of pins, compressing the data to be transmitted, reducing cross-talk between bit lines, etc., it is one of the popular techniques used in system design to reduce dynamic power consumed by the system bus. Bus encoding aims to reduce the Hamming distance between 2 consecutive values on the bus. Since the activity is directly proportional to the Hamming distance, bus encoding proves to be effective in reducing the overall activity factor thereby reducing the dynamic power consumption in the system.
State encoding assigns a unique pattern of ones and zeros to each defined state of a finite-state machine (FSM). Traditionally, design criteria for FSM synthesis were speed, area or both. Following Moore's law, with technology advancement, density and speed of integrated circuits have increased exponentially. With this, power dissipation per area has inevitably increased, which has forced designers for portable computing devices and high-speed processors to consider power dissipation as a critical parameter during design consideration.
