
Lunokhod was a series of Soviet robotic lunar rovers designed to land on the Moon between 1969 and 1977. Lunokhod 1 was the first roving remote-controlled robot to land on an extraterrestrial body.

The Ames Research Center (ARC), also known as NASA Ames, is a major NASA research center at Moffett Federal Airfield in California's Silicon Valley. It was founded in 1939 as the second National Advisory Committee for Aeronautics (NACA) laboratory. That agency was dissolved and its assets and personnel transferred to the newly created National Aeronautics and Space Administration (NASA) on October 1, 1958. NASA Ames is named in honor of Joseph Sweetman Ames, a physicist and one of the founding members of NACA. At last estimate NASA Ames had over US$3 billion in capital equipment, 2,300 research personnel and a US$860 million annual budget.

An aerobot is an aerial robot, usually used in the context of an unmanned space probe or unmanned aerial vehicle.

Mars Pathfinder is an American robotic spacecraft that landed a base station with a roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight, 10.6 kg (23 lb) wheeled robotic Mars rover named Sojourner, the first rover to operate outside the Earth–Moon system.

Telerobotics is the area of robotics concerned with the control of semi-autonomous robots from a distance, chiefly using television, wireless networks or tethered connections. It is a combination of two major subfields, which are teleoperation and telepresence.

Phoenix was an uncrewed space probe that landed on the surface of Mars on May 25, 2008, and operated until November 2, 2008. Phoenix was operational on Mars for 157 sols. Its instruments were used to assess the local habitability and to research the history of water on Mars. The mission was part of the Mars Scout Program; its total cost was $420 million, including the cost of launch.
Zoë is a solar-powered autonomous robot with sensors able to detect microorganisms and map the distribution of life in the Atacama Desert of northern Chile, duplicating tasks that could be used in future exploration of Mars. Zoë is equipped with tools and sensors to search for direct evidence of life beneath the surface of the ground. Zoë significantly aids in research needed to study Mars because it acts as a mobile observer and analyzer of any signs of life in a given location. She collects primary data which will help in understanding conditions present on Mars. This project will verify reliability of autonomous, mobile, and scientifically made robots.

A rover is a planetary surface exploration device designed to move over the rough surface of a planet or other planetary mass celestial bodies. Some rovers have been designed as land vehicles to transport members of a human spaceflight crew; others have been partially or fully autonomous robots. Rovers are typically created to land on another planet via a lander-style spacecraft, tasked to collect information about the terrain, and to take crust samples such as dust, soil, rocks, and even liquids. They are essential tools in space exploration.

NASA's Desert Research and Technology Studies is a group of teams which perform an annual series of field trials seeking to demonstrate and test candidate technologies and systems for human exploration of the surface of the Moon, Mars, or other rocky bodies.
The Solar System Exploration Research Virtual Institute (SSERVI), originally the NASA Lunar Science Institute, is an organization, established by NASA in 2008, that supplemented and extended existing NASA lunar science programs. Supported by the NASA Science Mission Directorate (SMD) and the Exploration Systems Mission Directorate (ESMD), SSERVI is a NASA program office located at the NASA Ames Research Center and was modeled on the NASA Astrobiology Institute (NAI) with dispersed teams across the nation working together to help lead the agency's research activities related to NASA's human exploration goals. Competitively selected team investigations focused on one or more aspects of lunar science investigations of the Moon, from the Moon, and on the Moon.
Almost Human: Making Robots Think is a book written by Lee Gutkind founder of Creative Nonfiction. Gutkind spent six years as a "fly on the wall" researcher at the Robotics Institute at Carnegie-Mellon University in Pittsburgh. He observed scientists and students working to design, build, and test robots so advanced that they will one day be able to work alongside or, in some cases, even replace humans. Almost Human is an intense portrait of the robotic subculture and the challenging quest for robot autonomy. Almost Human is 330 pages long and is published by W.W. Norton. In May 2007 Gutkind appeared as a guest author on The Daily Show with Jon Stewart to talk about robots, the future, and his book.
Astrobiology Science and Technology for Exploring Planets (ASTEP) was a program established by NASA to sponsor research projects that advance the technology and techniques used in planetary exploration. The objective was to enable the study of astrobiology and to aid the planning of extraterrestrial exploration missions while prioritizing science, technology, and field campaigns.

A lunar rover or Moon rover is a space exploration vehicle designed to move across the surface of the Moon. The Apollo Program's Lunar Roving Vehicle was driven on the Moon by members of three American crews, Apollo 15, 16, and 17. Other rovers have been partially or fully autonomous robots, such as the Soviet Union's Lunokhods, Chinese Yutus, and the Indian Pragyan. Four countries have had operating rovers on the Moon: the Soviet Union, the United States, China and India.

K10 are rovers used to explore planetary surfaces. Each third-generation K10 has four-wheel drive, all-wheel steering and a passive averaging suspension. This helps reduce the motion induced by travel over uneven ground. The K10 has mounting points on its front, back, and bottom that allows for antennas, sensors, and other scientific instruments to be attached. The K10 controller runs on a Linux laptop and communicates via 802.11g wireless, or a Tropos mesh wireless.
Intelligent Robotics Group (IRG) is a division of the Ames Research Center at Moffett Federal Airfield in California's Silicon Valley.
Terrestrial analogue sites are places on Earth with assumed past or present geological, environmental or biological conditions of a celestial body such as the Moon or Mars. Analogue sites are used in the frame of space exploration to either study geological or biological processes observed on other planets, or to prepare astronauts for surface extra-vehicular activity.
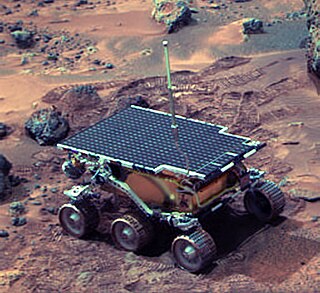
Sojourner is a robotic Mars rover that landed in the Ares Vallis channel in the Chryse Planitia region of the Oxia Palus quadrangle on July 4, 1997. Sojourner was operational on Mars for 92 sols. It was the first wheeled vehicle to rove on a planet other than Earth and formed part of the Mars Pathfinder mission.

Marsokhod is a Russian Mars rover project that was intended for use in the Mars-96 mission. Instead it was used for experiments into improving rover technology.
Signs Of LIfe Detector (SOLID) is an analytical instrument under development to detect extraterrestrial life in the form of organic biosignatures obtained from a core drill during planetary exploration.

BRUIE is an autonomous underwater vehicle prototype by NASA's Jet Propulsion Laboratory. The prototype began underwater testing in 2012 and it is meant to eventually explore the interior of water worlds in the Solar System, such as Europa or Enceladus.
